


How To Build A Cost-Efficient Remote Sensing Lidar Payload using an Inertial Navigation System
Inertial Labs became strategic partners with ROCK robotic in late 2020 to meet the demand for a cost-efficient remote sensing payload utilizing Lidar and/or photogrammetry technology. ROCK robotic is a team of cutting-edge Lidar and photogrammetry innovators founded by the YouTube sensation, Indiana Drones (Harrison Knoll). Along with his brother and co-owner Alex, Harrison leads the charge for ROCK robotic in bringing these low-cost systems to the scanning and surveying community.
ROCK robotic and Inertial Labs share a common vision of providing a precise, lightweight, and cost-efficient remote sensing payload. With that in mind, the ROCK R1A and R2A were made integrating the INS-D-OEM with the Livox Mid-40 Lidar scanner and 24.5MP RGB camera with varying cameras for photogrammetry. The R1A can be mounted on a variety of DJI Drones including the Matrice 600, Matrice 300, Matrice 210 (as well as the 200), and the Inspire 2. With the enhanced attitude accuracy of the INS-D-OEM, the ROCK R1A and R2A can produce colourized point clouds with an accuracy of 2 – 3 cm when incorporating the streamlined PPK correction offering. The Inertial Labs INS-D-OEM is a part of Inertial Labs' new generation of fully integrated, multiple-constellation, high-performance strapdown systems that determine position, orientation, and velocity for any mounted device. The INS-D-OEM was designed to provide a highly accurate low-cost solution for a variety of applications.

Features of the INS-D-OEM Inertial Navigation System
The INS-D-OEM utilizes the NovAtel OEM7720, an advanced dual-antenna multi-frequency GNSS receiver. This receiver supports TerraStar correction services for serial USB, CAN, and Ethernet connectivity, and supports signals across GPS, Glonass, Galileo, BeiDou, QZSS, and IRNSS (NavIC) constellations. It utilizes high-grade MEMS accelerometers and tactical grade MEMS gyroscopes. These high-quality sensors along with an on-board sensor fusion Kalman filter, allow for a PPK heading accuracy of 0.03 degrees and a PPK pitch & roll accuracy of 0.006 degrees. Conversely, there are a variety of industrial applications that do not require inertial data to be post-processed. The INS-D-OEM boasts a 0.15-degree RMS 1-meter baseline dynamic heading accuracy and a 0.08-degree RMS dynamic pitch & roll accuracy. The accuracy of the INS is very important in remote sensing applications, as it directly impacts the accuracy of the flight trajectory.
The Importance of Intertial Measurement Units in Point Cloud Accuracy
Inertial Labs' INS-D-OEM utilizes a high precision MEMS IMU that is ideal for remote sensing applications. This IMU consists of advanced tri-axis MEMS accelerometers and gyroscopes, which provide accurate position, velocity, heading, pitch and roll of the payload. In addition, this tactical grade IMU outputs a PPS signal which is critical in the synchronization of calibrated data across all sensors. The impressive angular accuracy of the IMU allows for an attitude separation of just a few arcminutes, this low attitude separation is another feature that aids point cloud accuracy. Furthermore, the use of high-accuracy accelerometers allows for very good kinematic alignment. This significantly improves heading observability and in turn the overall accuracy of the point cloud.
The Importance of Boresighting in Point Cloud Accuracy
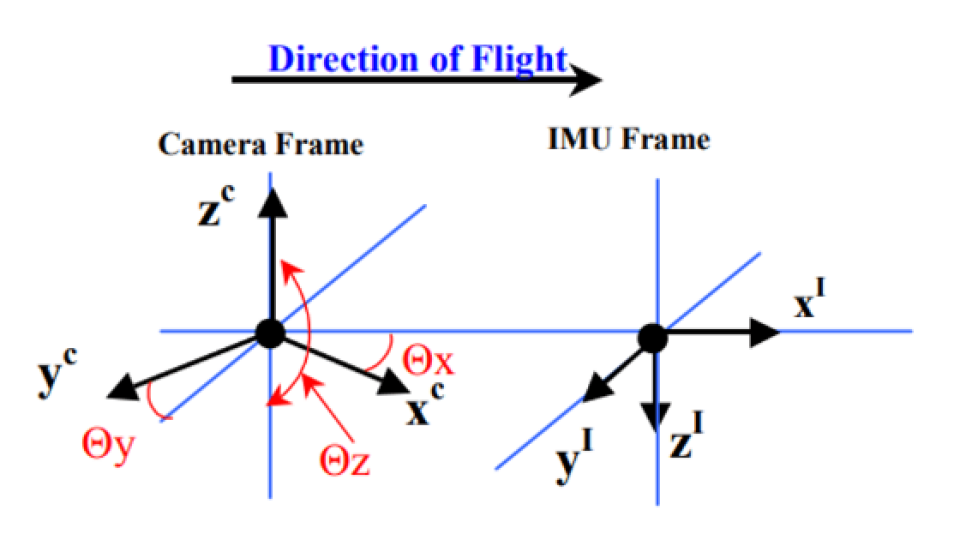
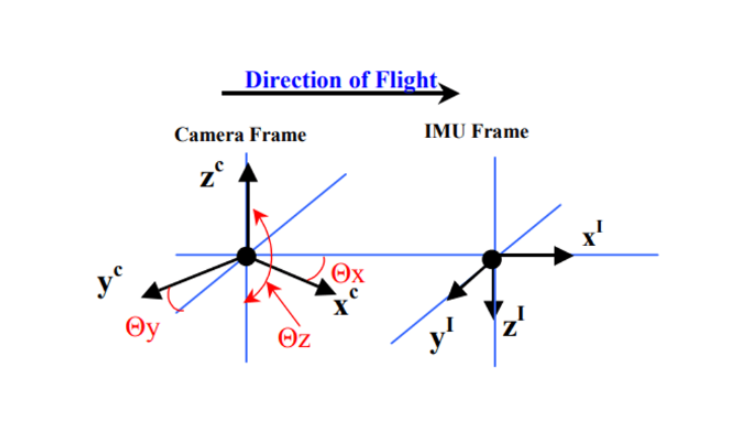
In addition to the IMU’s quality, there are some other factors that play a key role in producing accurate point clouds. The process of aligning the Lidar scanner and camera to the IMU is called "boresighting". The Lidar and the camera must be properly aligned with the IMU in the INS to accurately georeferenced point clouds and camera images. Each ROCK R1A and R2A unit is expertly boresighted in the housing to ensure that customers are getting the best possible results.

The Importance of Flight Trajectory in Point Cloud Accuracy
Accurate tracking of flight trajectory is a key component in producing thin, accurate point clouds. A flight trajectory is generated by taking raw IMU and GNSS data and correcting it with RTCM v3 traffic from a base station. An accurate trajectory is important for both point cloud generation and overlaying point clouds with camera images for photogrammetry, as it is used to keep track of the position and orientation of the solution at all times, especially when overlaying the camera images on top of the generated point cloud solution. In turn, the accuracy of each point logged by the payload is directly dependent on the accuracy of the trajectory. This is also the case for scanning and photogrammetric surveying, which uses payloads that produce colourized point clouds. The colourization of the point cloud is done by projecting images from the optical camera onto the point cloud. By ensuring an accurate trajectory, the user can be confident that the colourization of the point cloud is accurate at any given point.
Inertial Labs has done numerous flight tests using payloads that integrate the INS-D-OEM with a variety of the industry's leading Lidar sensors. In these tests, Inertial Labs can be confident that solutions using a real-time, RTK corrected trajectory can be expected to produce a point cloud with as thin as 3 centimetres of accuracy depending on the Lidar sensor. Flights requiring a post-processed PPK trajectory can be expected to generate a point cloud with an accuracy of 2-3 centimetres depending on the Lidar sensor.
Future Developments
Inertial Labs and ROCK robotic share a voracious desire to continue to develop and push industry boundaries, which is why this solution is being developed for autonomous vehicular navigation. Paired with an NVIDIA graphics card, the solution could be used for data processing in real-time, object detection, and SLAM navigation for autonomous vehicles. Furthermore, models can be developed that pair the INS-D-OEM with Lidar scanners from industry leaders such as Livox, Velodyne, Quanergy and Ouster. These companies' sensors allow Inertial Labs and ROCK robotic to accommodate a much wider group of applications that have a varying field of view, scan rate, and range requirements. In addition to pairing the INS with a variety of Lidar scanners, Inertial Labs is continually expanding on their catalogue of available optical cameras for colourized point cloud generation. The INS-D-OEM is also being developed to work with stereo cameras, thermal cameras, and infrared cameras.
Conclusion
The Inertial Labs INS-D-OEM has quickly become a viable option for companies and end-users looking to perform highly accurate topographic surveys, analysis for construction site monitoring, utility inspection (power lines and communication towers), and many more remote sensing applications at a cost-efficient price point. Moreover, the INS-D-OEM is becoming an exciting solution for companies both domestically and internationally that are interested in remote sensing. As their relationship with ROCK robotic, Inertial Labs is constantly looking for mutually beneficial partnerships to continue to innovate and develop the technologies of tomorrow.
Do you have questions about this case study?
Get in touch with Inertial Labs, Inc., and they would be happy to answer any questions you have about pricing, suitability, availability, specs, etc.
Related products



![Do-Giant-Tortoises-Make-Good-Neighbors-1[1].jpg](https://cdn.geo-matching.com/vRMO2Edp.jpg?w=320&s=a6108b2726133ff723670b57bc54c812)




{kind=link}