 Promoted
Promoted
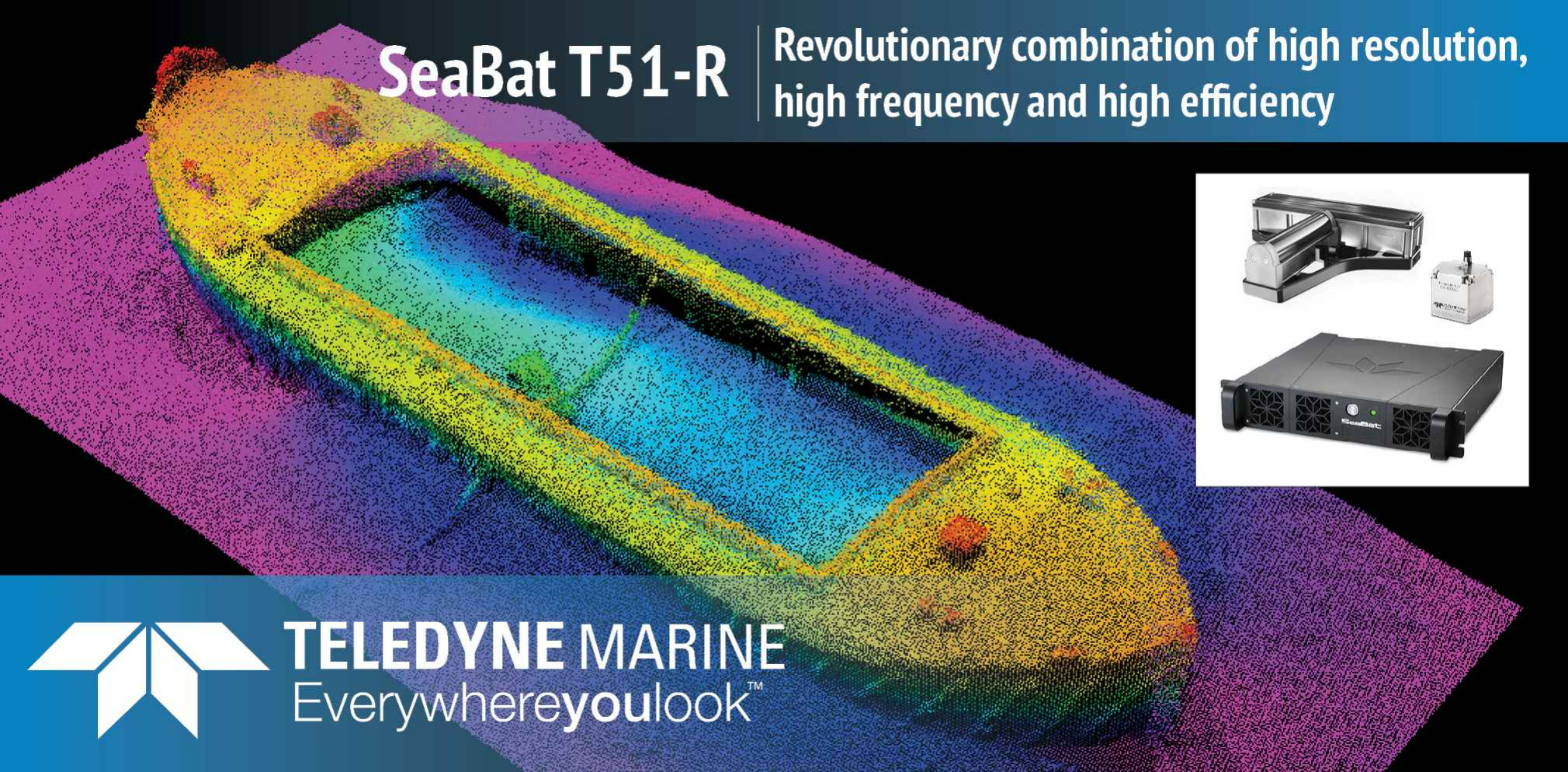
Multibeam Echosounders
Multibeam Echosounders are a type of sonar that is used to map the seafloor. Like other sonar systems, multibeam systems emit sound waves in a fan shape beneath a ship's hull. The amount of time it takes for the sound waves to bounce off the seabed and return to a receiver is used to determine water depth.
Showing 1-15 of 72 results
Promoted

EM304 MKII

EM2040 PHS

Flexview
EM 2042 Multibeam Echosounder
SeapiX FLS 7

SeapiX FLS 5
SeaBat T51-ASV

SeaBat T50-ASV

SeaBat T50-R

SeaRAY

Bathyswath-3 ALPHA (B3A)

Bathyswath-3 SIGMA (B3S)

SeaBat T51-R
GeoSwath USV
Need some help? Ask a Geo-matching expert!
Our team and network of 1000+ manufacturers and developers is here to assist you.



