












APACHE 4 USV
Autonomous Hydrographic and Bathymetric Surveys USV
The APACHE 4 is an Unmanned Surface Vehicle (USV) that supports a wide variety of Acoustic Doppler Current Profiler (ADCP) systems available on the market. It offers an unmanned operation solution with a shallow draft, high navigational accuracy and stable hovering for hydrologists when measuring water flow velocity and discharge of a current section.

CHC Navigation | CHCNAV
Shanghai, CN
Description
-
ADVANCED NAVIGATION CONTROLLER
Adaptive water flow straight-line and hovering technology
The APACHE 4 control system enables navigation straight along the cross-section according to the profile view when the flow rate, turbulence, etc. change. The hovering technology can make APACHE 4 hover stably in the turbulent flow at the start and endpoints of ADCP observation, thereby improving the accuracy of flow estimation.
-
COMPATIBLE WITH COMMON ADCP
Versatile. Carries up to 30 kg of payload
The APACHE 4 central access shaft design provides unmanned cross-sectional flow measurement solutions for the leading ADCPs on the market. The APACHE 4 is particularly suited for hydrologists using ADCP sensors such as the M9, RTDP 1200, RiverPro, and RiverRay looking for an integrated, portable, and affordable unmanned solution. It not only carries the ADCP but also provides its positioning, orientation, power, waterproofing, network, and 4G transmission solutions.
-
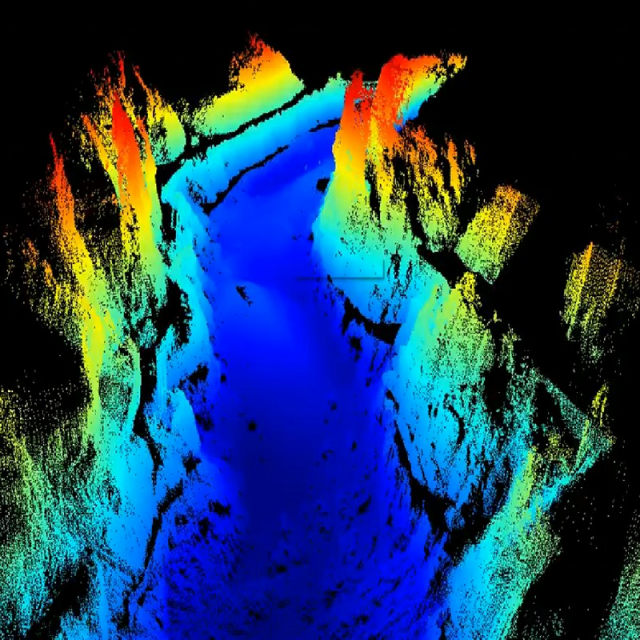
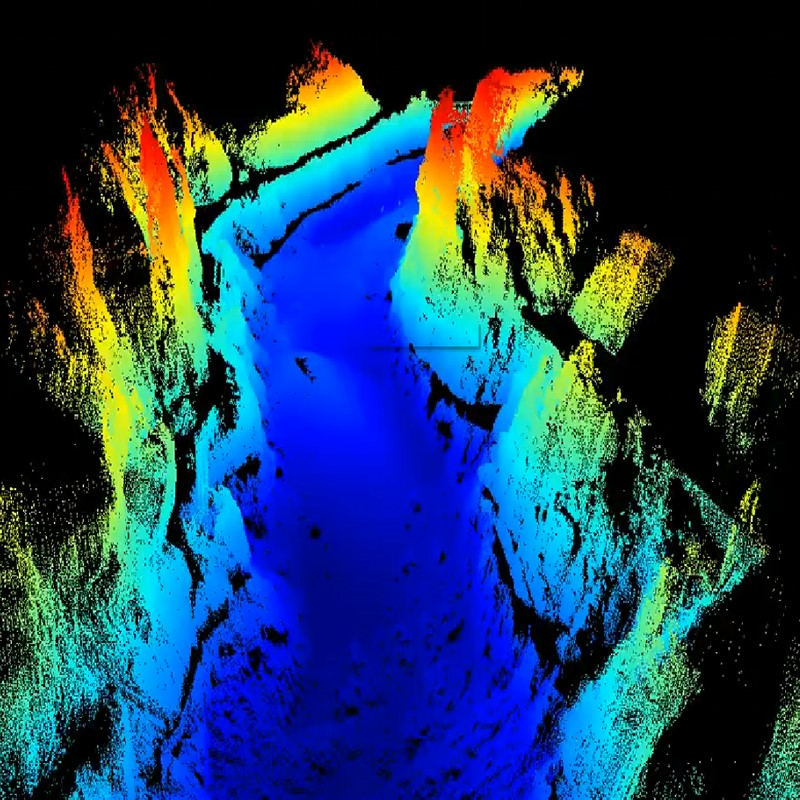
BUILT-IN SINGLE-BEAM ECHO SOUNDER
Expand your unmanned survey capability
Singlebeam sounding data can be used to verify the accuracy of ADCP bottom tracking data and even fed directly into the ADCP flow measurement software to compensate for the unavailability of ADCP data and, simultaneously, provide water depth profile data associated with the flow velocity of profile measurement.
-
SMART POSITIONING AND NAVIGATION
Uninterrupted positioning with GNSS+IMU
APACHE 4 provides a stable position and heads to the ADCP and autopilot. Its IMU sensor ensures the availability of position data even during momentary GNSS signal loss. The obstacle avoidance radar system and live video feed ensure safe operations in case of loss of visibility or difficult environmental conditions. Completely autonomous, the APACHE 4 is safely operated from the shore. The AutoPlanner and HydroSurvey software suite allow the operator to define the entire mission, from the survey area to the export of the results.
The APACHE 4 is an unmanned surface vehicle (USV) that supports a wide variety of Acoustic Doppler Current Profiler (ADCP) systems available on the market. It offers an unmanned operation solution with a shallow draft, high navigational accuracy, and stable hovering for hydrologists when measuring water flow velocity and discharge of a current section.
Designed for efficient hydrographic, bathymetric, and hydrological surveys, the APACHE 4 USV brings together the best high-accuracy positioning and automated navigation control technology built around the operator's habits when conducting ADCP hydrographic cross-section flow measurements. The built-in adaptive water flow and hovering navigation technology significantly improve the accuracy of flow estimation. Even when GNSS positioning might be degraded by obstructed environments, the internal GNSS+IMU module provides a reliable position and heading for the ADCP and autopilot controller.
Additionally to the standard package that includes the remote control boat, Singlebeam Echosounder, and GNSS IMU sensor, the Apache 4 USV can be equipped and delivered with the Teledyne Riverray or Riverpro, Sontek M9 or ROWE Seaprofiler ADCP for water discharge management, and with the CHCNAV's Sidescan module used for the underwater object detection, or with the CHCNAV's water quality assessment sensor to measure water quality parameters. The obtained data can be effectively used by researchers and engineers.
Do you have questions about this product?
- Questions about price, availability, and/or retailers
- Questions about technical specifications and usage
- Questions about suitability for your project or application
Specifications
-
More information
-
Applications
Bathymetric survey and hydrographic surveying in Channel, river, lake, offshore construction; Dredging; Site selection of Dam, hydro power station.
Distinguishable features
Portable; Single personal operator; Absolute Linear Technology; Stable hovering technology; Adaptive water flow straight line technology; Integrated GNSS board with IMU for advanced navigation controller; compatible with the most common ADCPs; built-in echo sounder;
Commercial Options
From Distributors
-
General
-
Length [m]
1.2
Width [m]
0.75
Height [m]
0.3
Min. weight of USV in air [kg]
9
Max. Weight of USV in air [kg]
39
Portable
Y
Draft [m]
0.1
Number of thrusters
2
Thruster specifications
Electric type, brushless DC, veering without steering engine, max. motor power 7000 rpm
Chassis
With separate bracket to hold the hull
-
Communication and Control
-
Type of Communication
Network bridge, 4G, UHF, video
Max. Baud rate [Mb/s]
115200
Data sent to shore
Network bridge or 4G for echo sounder data and ADCP data, real-time video and RTCM corrections
Auto- control
Yes
Control parameters sent to the USV
Navigation route for auto mode
Emergency recovery procedure
Auto return back to home point while low battery or signal loss
-
Navigation and Payload
-
Navigation sensors - standard
Integrated GNSS board with IMU for auto mode
Navigation sensors - optional
Remote controller for manual mode
Payload sensors - standard
D230 single beam echo sounder
Payload sensors - optional
ADCP
-
Operations
-
Operational Area
Lakes, Inland Rivers, Coastal Areas
Launch and Recovery System
Single person launch; Auto-return to home point while low battery and signal loss
Max. speed [kn]
9.7
Min. crew size
1
Min. required number of surface computers
1
Max. Remote Operating Range {m}
1000
Available size of storage room
16 GB
Max. WMO seastate
2
-
Energy and Propulsion
-
Propulsion
2 propellers
Energy Source
Li-ion Battery
Propulsion Power
700 rpm
Endurance at nominal power [hr]
2 x 2 hours @ 2m/s (running on 2 battery sets)
Documents
Brochure
apache-4-ds-en.pdf
872.56 KB













{kind=link}