
RiSOLVE
RiSOLVE takes the complexity out of the registration process by utilizing positioning information provided by sensors integrated into RIEGL VZ-Line scanners. Combining position estimation utilizing this onboard sensor data along with a new algorithm for aligning scans without reflectors or precise positioning enables a fine adjustment of all scans to produce seamless fully registered point clouds.

RIEGL | Innovation in 3D
Horn, AT
Description
RiSOLVE takes the complexity out of the registration process by utilizing positioning information provided by sensors integrated into RIEGL VZ-Line scanners. Combining position estimation utilizing this onboard sensor data along with a new algorithm for aligning scans without reflectors or precise positioning enables a fine adjustment of all scans to produce seamless fully registered point clouds.
Do you have questions about this product?
- Questions about price, availability, and/or retailers
- Questions about technical specifications and usage
- Questions about suitability for your project or application
Specifications
-
Hardware/software requirements
-
RAM [GB]
1.024
HD [GB]
100
Stand-alone
Yes
Processor
[]
-
Other
-
Support
Yes
Training
Y
Typical applications
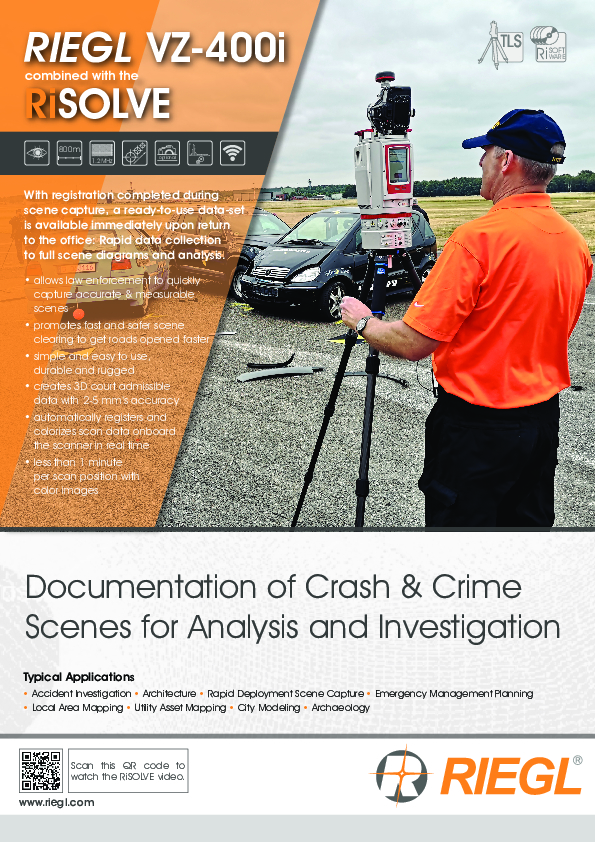
fast registration of terrestrial laser scans
Distinguishing features
automated registration, colouring, and pdf creation
-
Files and Registering
-
Input formats
ASCII,LAS,jpg,tif,bmp,rxp,rdd,3dd,vtp
Output formats
ASCII,dfx,ptc,LAS,WRL,pts,ptx,dm,pod
Automatic Target Detection
Y
Stitching multiple scans
Y
-
Pre-processing and Automatic Filtering
-
Image matching facilities
N
Frequency domain decoding for data reduction
0
Removal of vegetation
Y
Bare ground DEM generation
Y
-
Manual Measurements
-
3D Coordinates extraction
Y
Length and Height
Y
Distance
Y
Area
Y
Volume
Y
-
Interoperability
-
Assigning colour from imagery to points
Y
Image overlay on TIN
Y
-
General
-
Year of last update
2016
Year of initial introduction
2013
Modules
0
Source of Point Clouds
Indoor TLS, Outdoor TLS
Supported Systems
RIEGL Laser Scanner
-
Analysis
-
Line of sight
N
Aspect and slope
N
Simulation facilities
No
-
Automatically Generated Products
-
Regular Grid DEMs
N
Cross sections
Y
TIN
Y
Break lines
Y
Building footprints
N
Building roofs
N
3D City modelling
No
-
Solid Modelling
-
Lines
N
Planes
Y
Spheres
Y
Cylinders
Y
NURBS
N
Earth surface features
No
-
Visualisation and Editing
-
Zoom, pan and rotate
Y
Fly-throughs
Y
Adding Points
N
Removing Points
Y
Point Reduction
Y
Documents
Brochure
RiSOLVE Brochure.pdf
9.83 MB
Videos

{kind=link}