
PointFuse Standard
Classified meshes for more intelligent data decisions
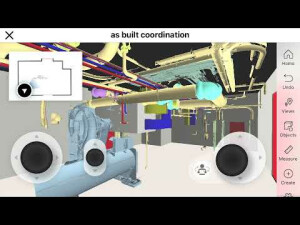
PointFuse is an integral part of all reality capture workflows. It converts any kind of point cloud data into easy-to-use segmented 3D mesh models. Whether you are using reality capture data for visualization, BIM coordination, collaboration or space and facilities management, PointFuse is a simple solution that delivers accurate, scalable results that generate significant savings on both cost and time.
PointFuse
Maidenhead, GB
Description
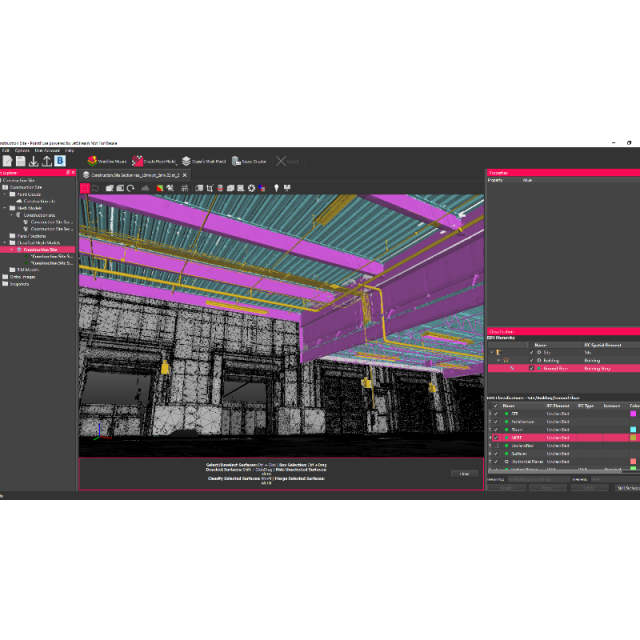
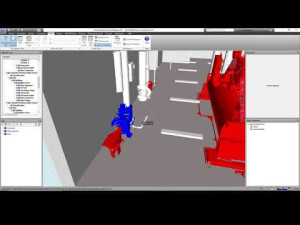
PointFuse automatically converts any source of point cloud into intelligent, segmented 3D mesh models. It does this by automatically converting points to surfaces reducing file sizes by up to 90% outputting Megabytes not Gigabytes. Users can then select and quickly classify groups of objects within PointFuse. Do this to isolate features, such as walls, floors, pipework or steel frames. When exported using the industry standard IFC or FBX formats, the intelligent mesh model maintains this classification, making it easily recognisable within third part modeling software.
The benefits of classificaiton are:
- Only the objects that are most relevant will be uploaded and shared
- Eliminates unnecessary data transfer
- Makes production of the final model significantly quicker and easier
- Provides accurate, highly detailed models, in useful data formats, within a few hours
These intelligent meshes and connections to downstream modelling and project management software mean the data can be easily understood and shared across the whole project team, enabling better decision making.
PoinFuse has been designed to be easy to use. The time to process is extremely fast, with users typically reporting a 70% time saving across their workflow providing, savings of time and budget, and enabling almost 'real-time' collaboration.
Specifications
-
Hardware/software requirements
-
RAM [GB]
12
HD [GB]
500
Use of GPU
Y
Stereo Display
N
Processor
[]
Stand-alone
Yes
-
Other
-
Support
Online, phone, in person
Typical applications
Construction, Architecture, Surveying, Engineering, Heritage, Scan2BIM, Visualization,
Distinguishing features
- Converts any supported input point cloud to a vector model- Separates surfaces along break lines enabling feature extraction- Automatic, one button approach
Training
Y
-
Files and Registering
-
Input formats
LAS, PTS, XYZ, E57, DP, PFC
Output formats
DAE, OBJ, FBX, SKP, DXF, IFC, STL
Geo-referencing
N
Automatic Target Detection
N
Stitching multiple scans
N
-
Pre-processing and Automatic Filtering
-
Image matching facilities
N
Removal of individual outliers
N
Removal of vegetation
N
Removal of buildings
N
Bare ground DEM generation
N
-
Manual Measurements
-
3D Coordinates extraction
Y
Length and Height
Y
Angle
N
Distance
Y
Area
N
Volume
N
-
Interoperability
-
CAD software
Microstation, archicad,
Assigning colour from imagery to points
Y
Image overlay on TIN
N
-
General
-
Year of last update
2022
Year of initial introduction
2015
Source of Point Clouds
Outdoor TLS, Airborne Lidar, Indoor TLS, Photogrammetric, Radar
-
Analysis
-
Line of sight
N
Aspect and slope
N
Individual tree heights
N
Simulation facilities
No
Time series analysis
N
-
Automatically Generated Products
-
Regular Grid DEMs
N
Cross sections
Y
TIN
N
Contour Lines
N
Break lines
Y
Boundary detection of solids
Y
Building footprints
Y
Building roofs
N
-
Solid Modelling
-
Lines
N
Planes
N
Cubes
N
Spheres
N
Cylinders
N
NURBS
N
Industrial features
Pipes
-
Visualisation and Editing
-
Adding Points
N
Removing Points
Y
Point Reduction
N





{kind=link}