

Application of Cygnus SLAM Scanner in Urban Topographic Surveys
Project Background
For urban topographic mapping, in some areas where the permission of flight cannot be easily apply,ground mobile surveying is an ideal solution for its flexibility and less restrictions. In addition, using aerial remote sensing technology such as photogrammetry and airborne LiDAR for urban topographic mapping is unable to obtain complete 3D information of the city, data empty hole happens due to the occlusion of ground objects.
In the following case, we use the multi-platform application of SLAM to collect 3D information of urban viaducts and space under bridges, roads and tunnels, as the supplement to ALS (Airborne Laser Scanning) data. In addition to handheld mode, SLAM laser scanners can also support backpack carrying, vehicle-mounted and airborne.
Case Overview
We have the original ALS data of the expressway and its surrounding areas, however, there is a lack of complete information about roads, bridges, tunnels. In order to better express the completed data of this area, we use the mobile laser scanning based on SLAM to capture more detailed and completed point cloud data. The original ALS data is shown in Figure 1.
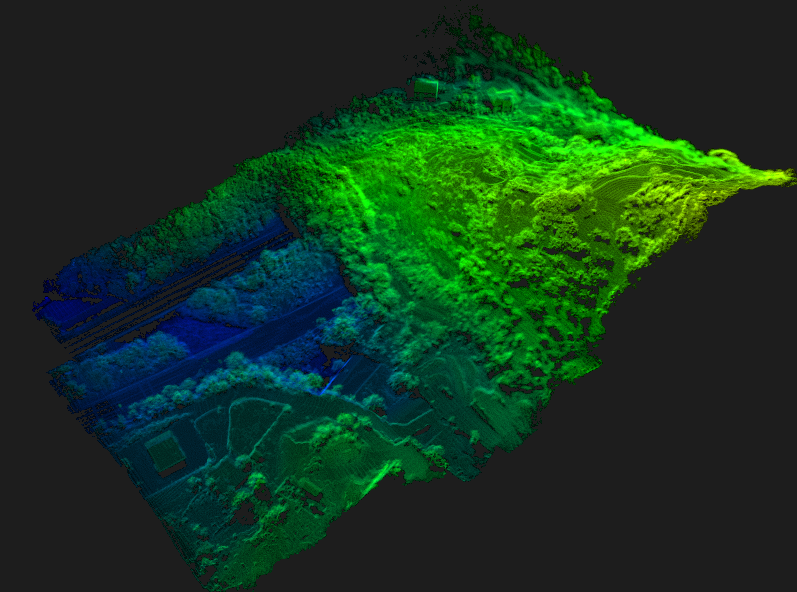
Figure 1 The origin ALS point cloud data
First, the bridge area was surveyed, and many preparations such as the point cloud data pre-acquisition experiment were carried out. According to the field environment and technical method validation, two scanning methods including vehicle-mounted and backpack were selected for this point cloud data acquisition to obtain high-precision point cloud data in a more efficient and flexible way. For the overpass and the space under the bridge, we use the backpack laser scanning method. For the information collection of roads and tunnels, we put the SLAM scanner on the vehicle for scanning.
Backpack mobile laser scanning system
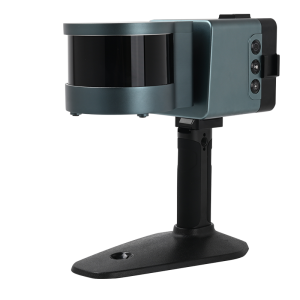
In the outdoor scene, users can use backpack mobile laser scanning system with RTK involved. The backpack mobile laser scanning system is light and solid, and can obtain point cloud data where the area restricted to people. By converting the RTK observation and SLAM trajectory, users can obtain the point cloud with absolute coordinate. RTK observations can be used as ground truth values to verify the absolute accuracy of SLAM. RTK observations can be added as global observation value (similar as closed-loop constraint) to correct the SLAM cumulative error. The following picture is Cygnus backpack mobile scanning system with RTK.

Figure 2 backpack mobile laser scanning system
We use the Cygnus backpack mobile laser system with RTK to capture the bridge area. The overview of backpack scanning point cloud data is shown in Figure 3 and the detail of the space under the bridge is in Figure 4.
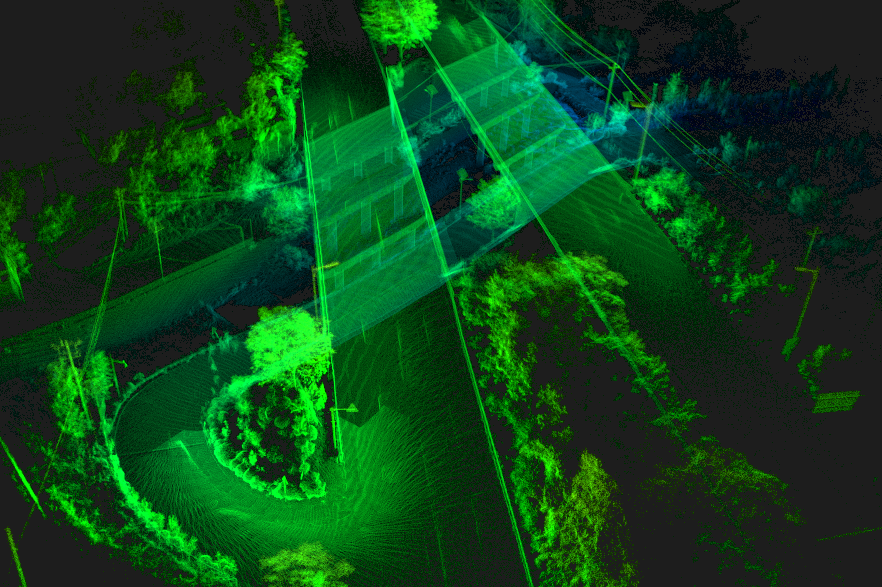
Figure 3 Backpack scanning point cloud data
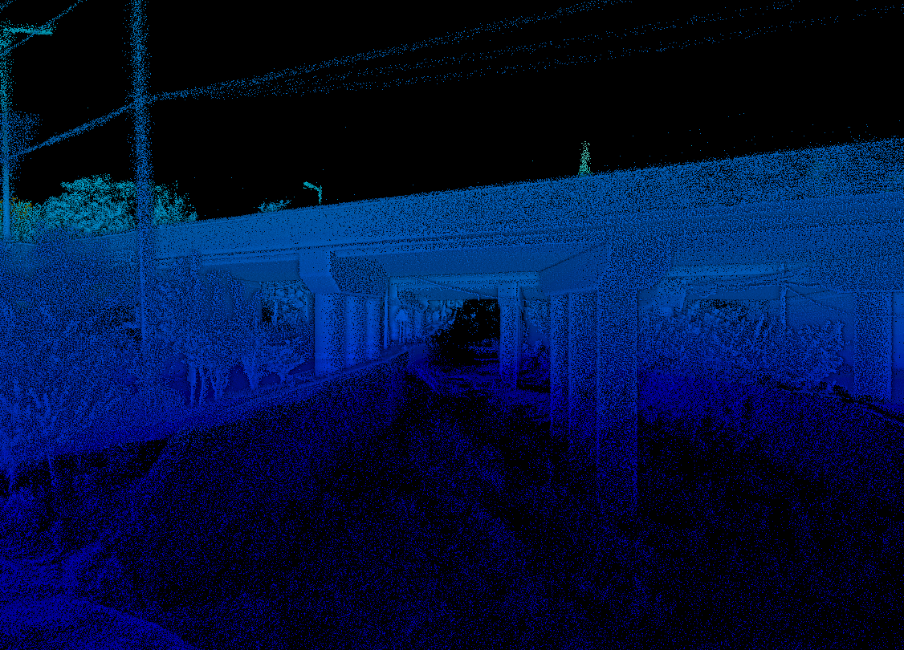
Figure 4 The local point cloud data of bridge pier
On-board SLAM scanning system
SLAM scanners can also be extended to vehicular applications. In terms of the corridor scene like roads and tunnels, mounting the SLAM scanner on the car and dynamically collects data during one-way or two-way travel along the road, which greatly reduces the scanning time instead of walking. For the measurer, it is also relatively physically friendly. The car kit is shown in Figure 5-a, and the overview of the car application for SLAM scanner is shown in Figure 5-b.

Figure 5 Car kit of the Cygnus SLAM scanner
We mount Cygnus SLAM scanners on the car and also RTK involved. To get better quality result, we set several control points in case of the GNSS signal is unlocked. In addition, the round-trip scanning operation to make the trajectory close-loop ensuring the more reliable data. The On-board scanning point cloud data is shown in Figure6-a, and the Point cloud of tunnel entrance reflects in Figure 6-b.
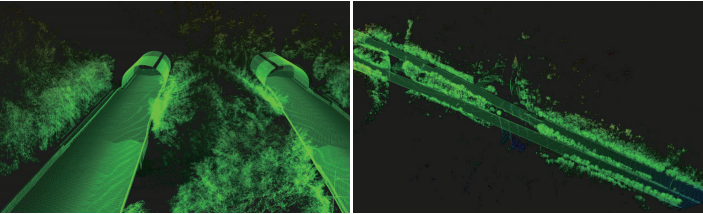
Figure 6 On-board scanning point cloud by Cygnus
Multi-source point cloud data
Both types of data are automatically solved with one key through the control of Cygnus’s SLAM Manager APP. Without too much manual intervention, it can greatly save manpower and time in actual production. And Point cloud data fusion is to unify vehicular, backpack and original airborne data into a consistent coordinate system and export *.las point cloud format. The fused point cloud data ensures the integrity of the bridge and its surrounding environment, and avoids the data “hole” to the maximum extent. The whole data is shown in Figure7.
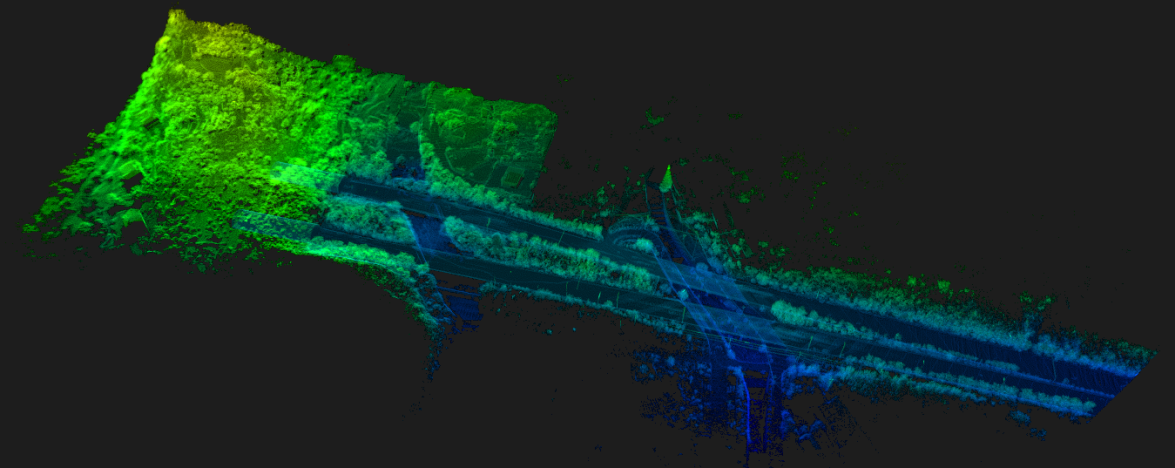
Figure 7 Multiple point cloud data
Conclusion
We take advantage of the SLAM Laser scanner’s versatility such as the backpack and vehicle-mounted to perform a better data collection, and combining SLAM solution with other aerial remote sensing technologies to obtain more complete and detailed three-dimensional urban information.
Do you have questions about this case study?
Get in touch with SatLab, and they would be happy to answer any questions you have about pricing, suitability, availability, specs, etc.






![Do-Giant-Tortoises-Make-Good-Neighbors-1[1].jpg](https://cdn.geo-matching.com/vRMO2Edp.jpg?w=320&s=a6108b2726133ff723670b57bc54c812)




{kind=link}