






CoPre LiDAR Processing Software
Processing of LiDAR Scanner Data
CoPre is a powerful software ecosystem developed by CHCNAV that enables users to process mobile geospatial mapping data quickly and efficiently. CoPre features accurate trajectory processing by a proprietary algorithm, point cloud and image georeferencing, point cloud colorization, filtering, and additional useful functions such as digital ortho model (DOM) generation, significantly improving postprocessing accuracy. CoPre is built around a simple and intuitive user interface. Geospatial professionals can export point clouds and image files without opening third-party software for the positioning and orientation system (POS) computations. It enables the analysis of complex information structures with absolute precision and empowers the world of 3D data processing. CoPre software is the backbone of CHCNAV's LiDARs system series, and it's regularly updated with new features, functionality, and tools.

CHC Navigation | CHCNAV
Shanghai, CN
Description
SUPPORT ALL CHCNAV'S LIDAR SCANNERS
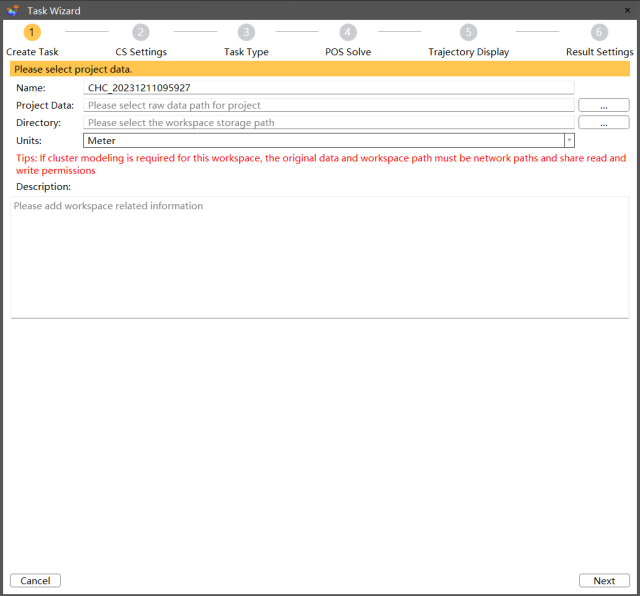
Instant access to raw data processing
CoPre desktop software provides instant access to raw data from all the CHCNAV LiDAR systems. Whether you want to process data from the compact AlphaAir 10 mobile mapper for UAVs, perform massive data processing from the vehicle-mounted AlphaPano or Alpha3D system, or get the results of your corridor mapping project with the AlphaUni 20 or AlphaAir 2400 on a helicopter, CoPre supports all your mapping scenarios.
EXTREME LIDAR DATA QUALITY
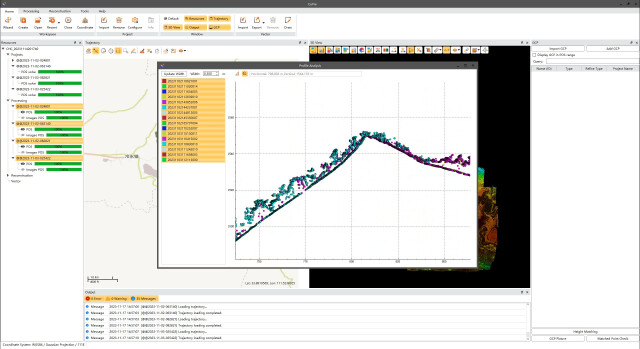
Advanced calibration and optimization technology
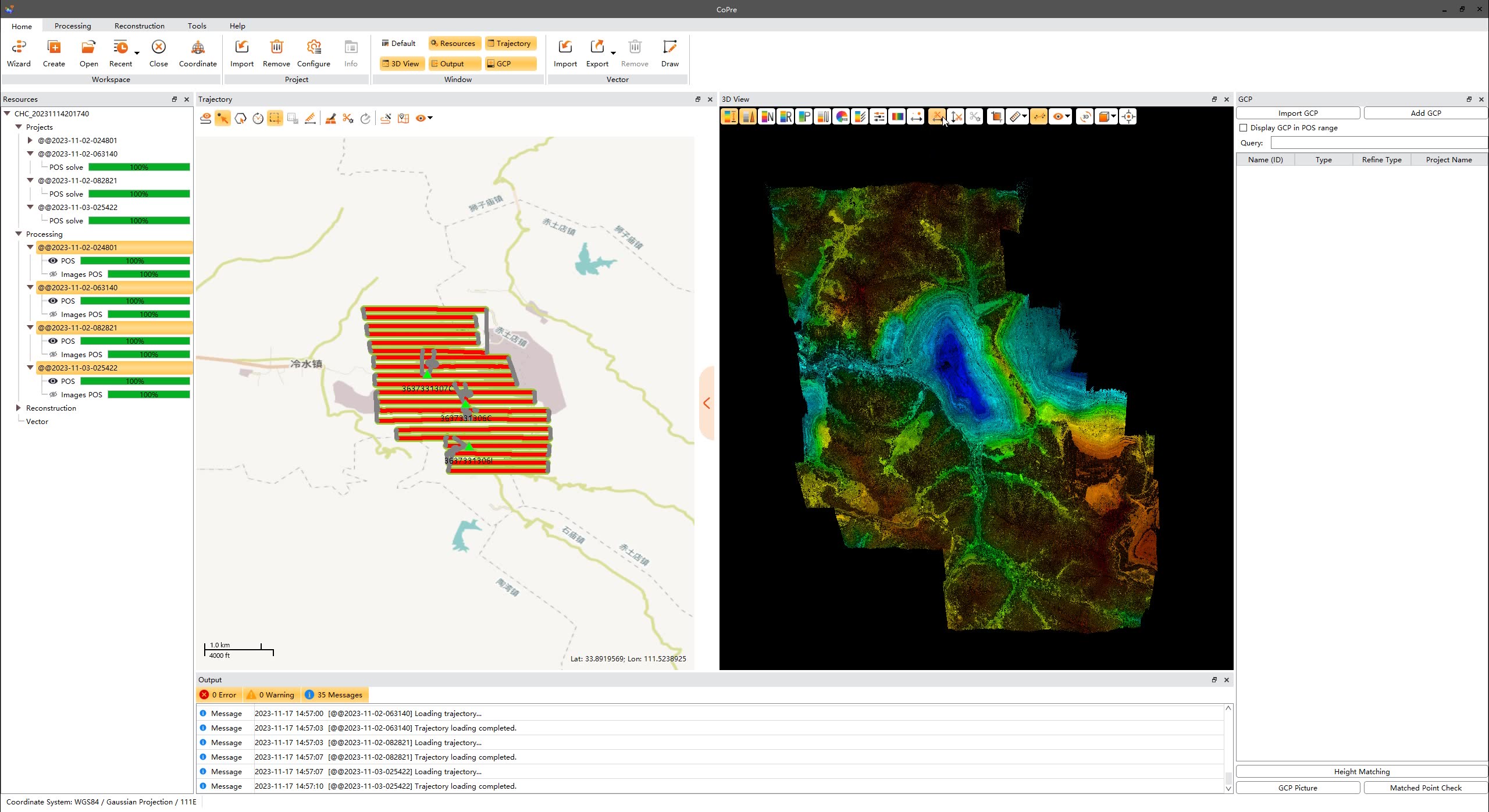
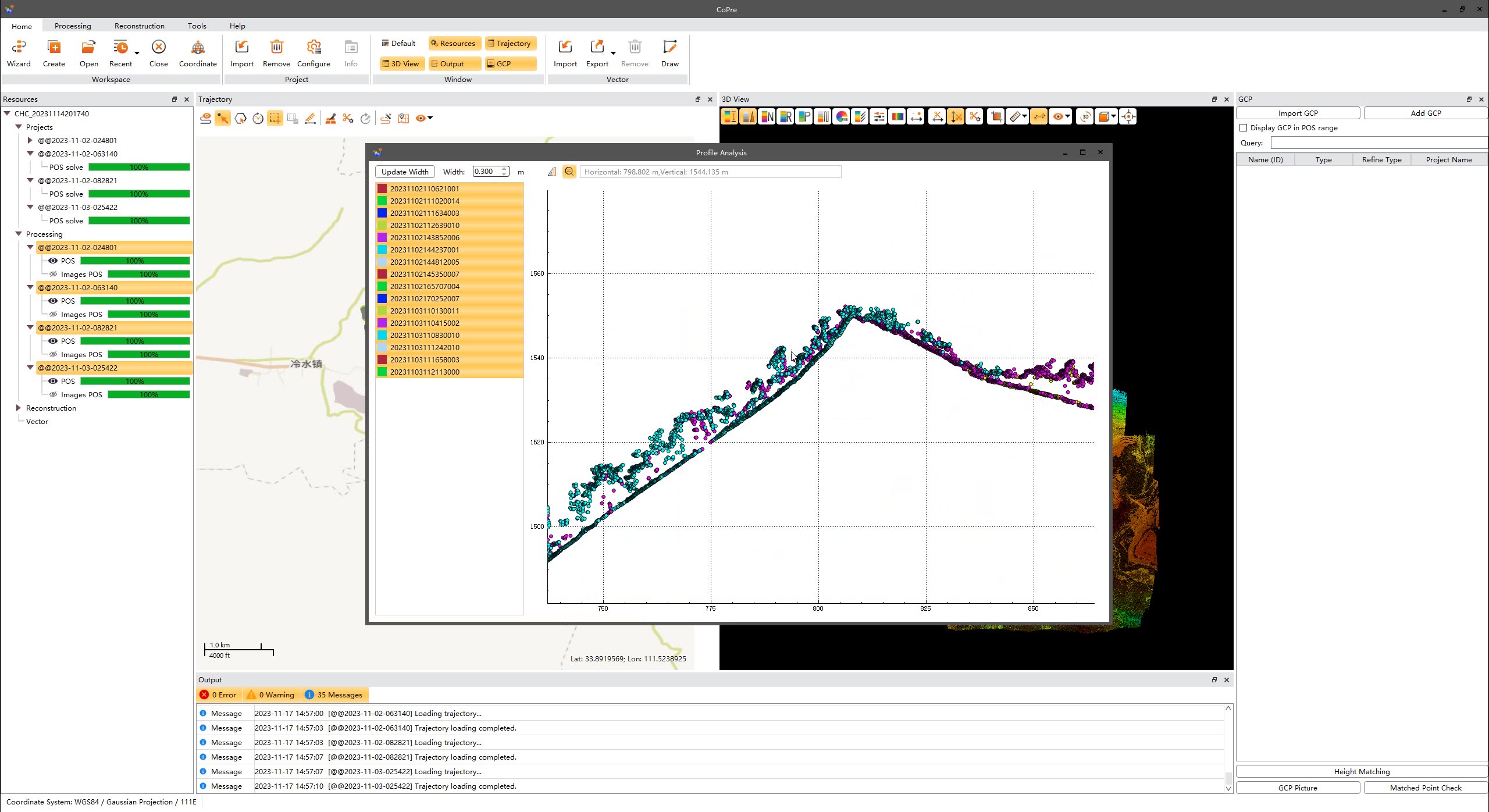
For experts searching to optimize their data quality further, CoPre features an advanced processing mode. It handles the layering problems of multiple point clouds and improves relative accuracy through an efficient strip adjustment algorithm. Additional use of ground control points (GCP) is available to improve the absolute accuracy of the point cloud. The advanced calibration and optimization technology results in a point cloud thickness that is 30% less than similar products provided on the market.
COMPREHENSIVE PRE-PROCESSING WORKFLOW
Process trajectory files, LiDAR data and RGB images.
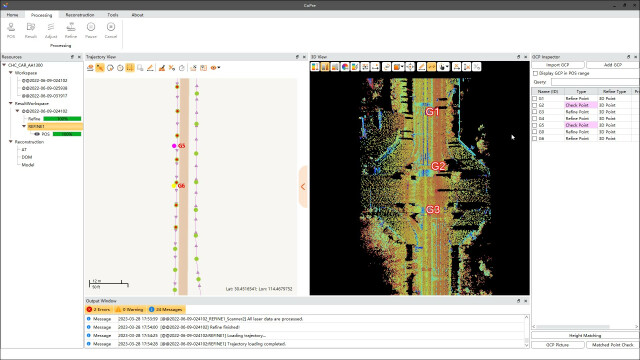
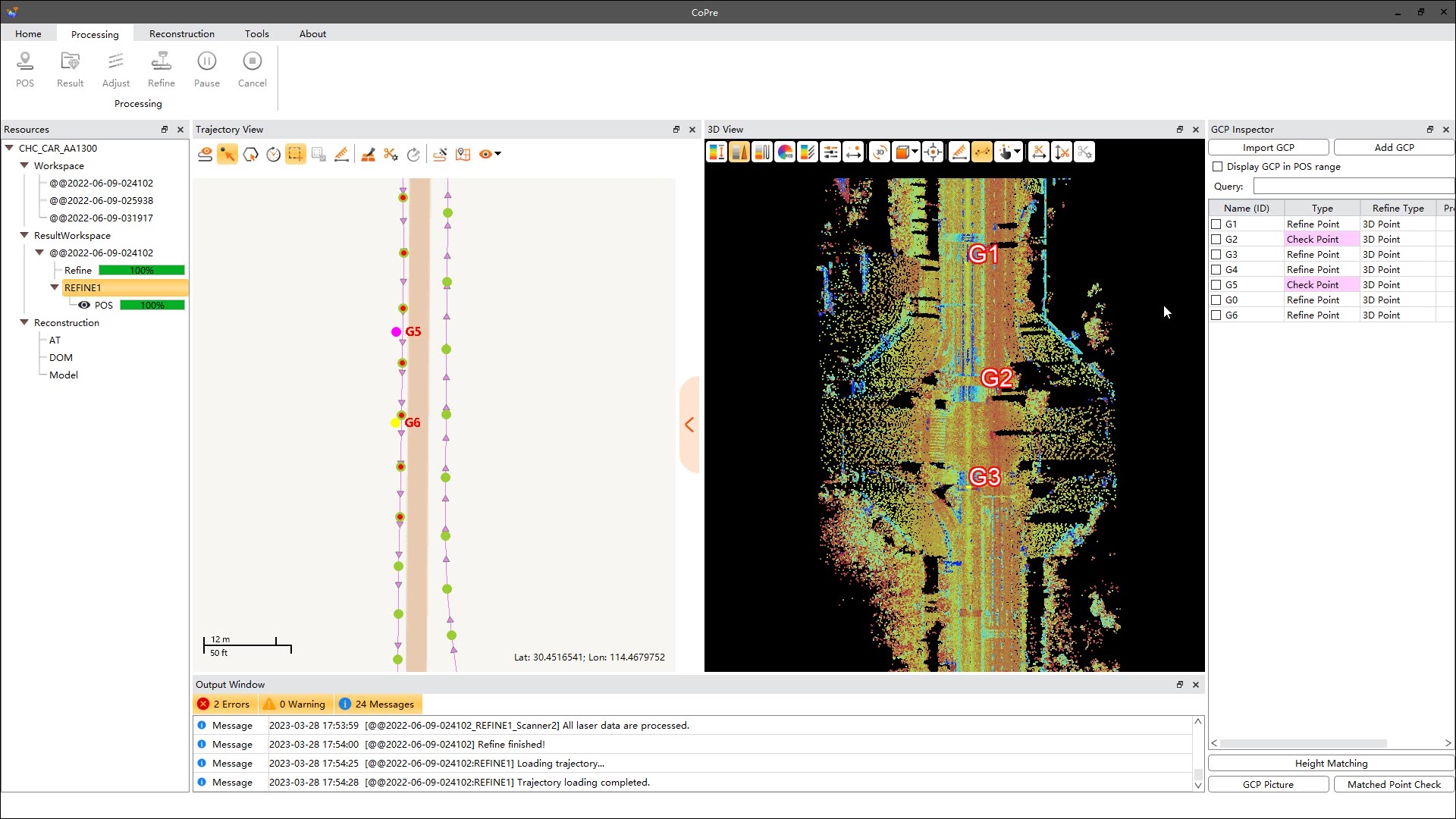
All LiDAR data processing starts with the first and foremost step of trajectory generation. CoPre is powered by the accurate and efficient algorithm developed by CHCNAV to process captured raw data, including trajectory (POS) files, LiDAR data, and RGB images. Multiple data sets can be processed simultaneously to increase workflow efficiency, solving the problem for SLAM-based units of updating a map of an unknown environment while simultaneously keeping track of the location within it.
EFFICIENT LASER SCANNER DATA ANALYSIS
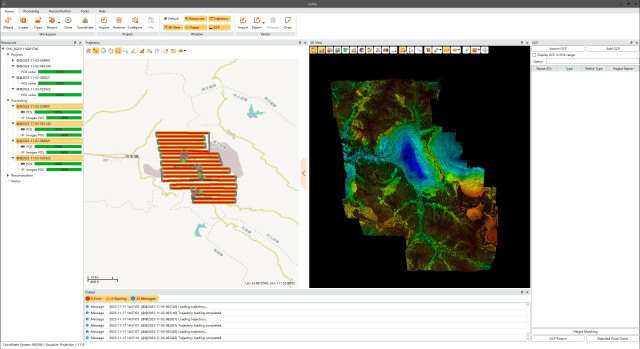
Visualization and colorization of mass data
CoPre includes different powerful options to check the data after the processing steps. It supports massive data set visualization with multiple colorization options. Its automatic trajectory slicing and stratification checking allow quick detection of misalignments across the entire data set. Elevation accuracy can be automatically verified by importing elevation control points. Multiple accuracy reports are available to address quality control requirements.
AUTOMATED PROCESSING
User-friendly data processing
CHCNAV's solutions leverage extensive mobile mapping data collection expertise to guarantee efficient data processing. CoPre enables automated point cloud processing, image georeferencing, point cloud colorization, depth maps, and one-click results output.
ADVANCED RECONSTRUCTION MODULE
DOM generation and modeling
Users can take full advantage of CHCNAV LiDAR airborne data capture thanks to the CoPre reconstruction module, which supports the aerial triangulation process and allows the final digital orthophoto and 3D mesh module output to be exported without the need for additional software. The DOM generation and modeling algorithm in CoPre also enables the combination of photos and point clouds captured simultaneously by CHCNAV LiDARs to rapidly export a high-quality orthophoto or 3D model for in-field verification.
Do you have questions about this product?
- Questions about price, availability, and/or retailers
- Questions about technical specifications and usage
- Questions about suitability for your project or application
Specifications
-
Hardware/software requirements
-
RAM [GB]
6
Use of GPU
Y
Processor
Intel® Core™ i7 (Minimum) Intel® Core™ i9 (Recommended)
Stereo Display
N
Stand-alone
No
HD [GB]
500
-
Other
-
Support
Online training/24h email reply
Training
Y
Typical applications
Survey
Distinguishing features
One button process
-
Files and Registering
-
Input formats
CHCNAV data folder
Output formats
LAS/LAZ/JPG/TIFF etc
Geo-referencing
Y
Automatic Target Detection
N
Stitching multiple scans
Y
-
Pre-processing and Automatic Filtering
-
Image matching facilities
Y
Removal of individual outliers
Y
Removal of vegetation
N
Removal of buildings
N
Bare ground DEM generation
N
-
Manual Measurements
-
3D Coordinates extraction
Y
Length and Height
Y
Angle
N
Distance
Y
Area
N
Volume
N
-
Interoperability
-
Assigning colour from imagery to points
Y
-
General
-
Year of initial introduction
2018
Year of last update
2024
Source of Point Clouds
Airborne Lidar
Supported Systems
CHCNAV LiDAR
-
Analysis
-
Line of sight
N
Aspect and slope
N
Individual tree heights
N
Time series analysis
N
-
Automatically Generated Products
-
Regular Grid DEMs
N
Cross sections
N
TIN
N
Contour Lines
N
Break lines
N
Boundary detection of solids
N
Building footprints
N
Building roofs
N
-
Solid Modelling
-
Lines
N
Planes
N
Cubes
N
Spheres
N
Cylinders
N
NURBS
N
-
Visualisation and Editing
-
Zoom, pan and rotate
Y
Fly-throughs
N
Adding Points
Y
Removing Points
Y
Point Reduction
Y
Documents
Brochure
CoPre_DS_EN.pdf
3.88 MB

Videos













{kind=link}