
Real-Time, Deep Ocean Seismic Detection
When it comes to a tsunami, minutes matter. But historically, deep ocean seismic observations have been sparse due to the high cost, risk, and difficulty in collecting data. Scripps Institution of Oceanography had an ambitious goal to change that—so they created an innovative, unmanned observatory for real-time seismic detection.
The Challenge
Over the past few decades, great strides have been made in land-based seismic observations. The same cannot be said about the ocean. Seismic observations — especially far offshore in the remote, deep ocean — are sparse at best due to the high-cost, risk, and difficulty in collecting data. Historically, moored buoys, research ships, and satellite telemetry have been used to collect the Earth’s vibrations, yet large coverage gaps exist. Without permanent seafloor seismic stations across the deep ocean to directly measure seismic activity, we reduce the world’s ability to predict tsunamis and lack the critical data for global seismic studies.
The Approach
To address this challenge, Dr. Jon Berger along with his collaborators, Dr. John Orcutt, Gabi Laske, and Jeff Babcock from Scripps Institution of Oceanography (Scripps), developed a system to deploy seismological observatories in the deep ocean and relay data to shore in near real-time. They have created an innovative, unmanned observatory that provides real-time seismic telemetry from the seafloor through the water column to space and shore. With funding from the U.S. National Science Foundation and in collaboration with Liquid Robotics, they have developed the High Seas Telemetered Seismographic Observatory. This system was created to demonstrate the feasibility of placing permanent seafloor seismic observatories, paired with surface communications gateways, to directly measure seismic activity in locations far from continental sites or nearby islands.
To overcome the obstacle of communicating seafloor sensor data to the ocean’s surface, Scripps scientists architected a two-part system comprised of the Ocean Bottom Package (OBP) sitting on the seafloor collecting and transmitting data to the Liquid Robotics’ Wave Gliders which serve as a free floating Ocean Surface Gateway (OSG).
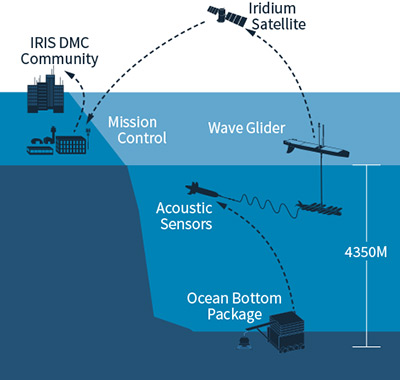
Deep Ocean Seismic Detection — Scripps Seafloor Sensor (Ocean Bottom Package) with an acoustic modem communicates with the Wave Glider that sends real-time data via Iridium satellite.
The Results
In September of 2014, Dr. Berger and his team launched the Wave Glider, 30 km from Point Loma, CA, to travel west of San Diego approximately 300 km. In 4350 m of water, the Wave Glider held station, collected and transmitted telemetry data in near real-time from the bottom seismic sensors to the Iridium satellite to its final destination. Tests of the surface gateway demonstrated an acoustic efficiency of approximately 396 bits/J. The Observatory has the ability to send 4 channels of compressed, 1 sample per second data from the ocean bottom to the surface gateway with an average power draw of approximately 0.15 W and a latency of less than 3 minutes. As long as the horizontal distance to the seafloor instrument was within an ocean depth, the data return rate was nearly 100%.
During the 68 days at sea, the system detected and recorded seismic earthquakes along with one small earthquake that did not appear in any earthquake catalog record on the nearest land station on San Clemente Island. This is the first near real-time observations of an earthquake from an autonomous offshore observatory. This data is invaluable to both national and international agencies to monitor and characterize earthquakes, tsunamis, and nuclear explosions.
“Our work with Wave Gliders as communications gateways achieves a long-sought goal of collecting near real-time seismic and other observables from the deep ocean floor. Implementing a system with this transformative technology is now a practical and affordable matter.”
— Jonathan Berger, Emeritus, Institute of Geophysics and Planetary Physics, University of California San Diego
What’s Next?
The next phase of the ongoing research was to design an ocean bottom package capable of being self-deployed. This approach uses the Wave Glider to tow an Ocean Bottom Package (OBP) to the desired location, release it, and then hold station to provide real-time telemetry. The Scripps scientists were successful in demonstrating this towing capability with little loss of speed. Using this approach significantly reduces the overall system and life cycle costs by eliminating the need for costly ship operations. With this successful demonstration, Scripps scientists are now closer to achieving their goal of collecting real-time data from the deep ocean floor.
Related products


![Do-Giant-Tortoises-Make-Good-Neighbors-1[1].jpg](https://cdn.geo-matching.com/vRMO2Edp.jpg?w=320&s=a6108b2726133ff723670b57bc54c812)








{kind=link}