
3D Point Cloud Data and the Production of Digital Terrain Models
This case combines Lidar point cloud post-processing software LiDAR360 and uses data collected from an open-pit mine as test data to introduce the application of 3D point cloud data in the production of terrain products.
Digital elevation model (DEM), digital surface model (DSM), digital terrain model (DTM), and contour lines are four commonly used geospatial features generated by UAV (drone) surveying and mapping systems. These products are very useful for landscape monitoring, such as terrain reconstruction, precision agriculture data analysis, landslide monitoring, and erosion assessment. In addition, LiDAR detection technology can collect data combined with remote sensing technology to provide three-dimensional (3D) data with high spatial and temporal resolution. This case combines LiDAR point cloud post-processing software LiDAR360 and uses data collected from a mountainous area as test data to introduce the application of 3D point cloud data in the production of terrain products.
1. Topographic product concept
DEM (Digital Elevation Model) realizes the digital simulation of the ground terrain (that is, the digital expression of the terrain surface form) through limited terrain elevation data. It simulates the earth in the X, Y, and Z dimensions, and digitally defines the Z dimension of the terrain. Variety;
DSM (Digital Surface Model) is a digital representation of elevation in a regular grid cell structure, which represents all related natural and man-made entities' earth terrain changes;
DTM (Digital Terrain Model) looks like DSM, but it excludes all-natural and man-made objects to a certain extent. It uses algorithms to remove natural and man-made entities from DSM and only represents terrain, thereby generating DTM;
The contour line refers to the closed curve formed by adjacent points of equal elevation on the topographic map. A closed curve formed by connecting points with the same altitude on the ground and projected vertically onto a horizontal surface, and scaled-down on the drawing to obtain a contour line.
For the terrain production analysis of 3D point cloud data, here we only discuss DEM, DSM, and contour lines. DTM is often used in GIS and mapping.
2. Production of terrain products
LiDAR is one of the most widely used technologies for obtaining point clouds to generate terrain products. Laser scanners are placed on satellites, airplanes/helicopters, ships/vehicles, or tripods. After the laser pulses are reflected by objects, the strength of the return signal provides information about the information of object characteristics is used to analyze point cloud data representing bare land, vegetation, water, or man-made ground feature infrastructure, for example. The analysis and application of point cloud data are often based on specific categories. The classified point cloud helps to analyze the objects of interest, speed up the calculation speed and reduce noise. For example, only if the vegetation points and ground points are classified first, the ground points can be used for interpolation to generate a continuous terrain surface without vegetation, that is, a digital terrain model (DTM). When removing the elevation (digital elevation model, DEM) from the vegetation surface (DSM, digital surface model), it can be used to estimate the vegetation height (canopy height model, CHM) and derivatives, such as total above-ground biomass. In the first step in the production of terrain products, we first classify the data, and divide the data into the ground point and non-ground point data.
Denoising
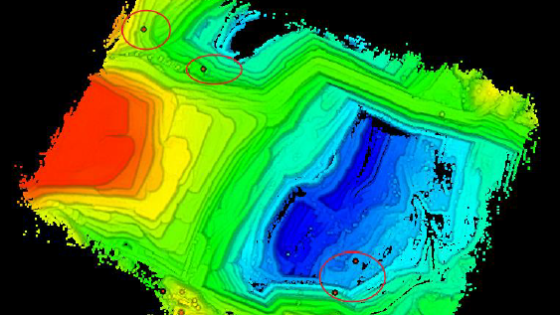
Before the ground point classification, we first need to check the data quality, remove the influence of isolated points and noise, and make the generated terrain products such as DEM and DSM closer to the real terrain shape. Denoising is to remove the influence of high-level gross errors and low-level gross errors. High-level gross errors are usually affected by flying objects (such as birds, airplanes, or floating foreign objects) that the airborne LiDAR system receives in the process of collecting data. The reflected signal of the object is recorded as the measured object target. The low error is caused by the multipath error in the measurement or the systematic error of the laser rangefinder. In this example, the noise is shown in Figure 1below:

Do you have questions about this case study?
Get in touch with GreenValley International, and they would be happy to answer any questions you have about pricing, suitability, availability, specs, etc.



![Do-Giant-Tortoises-Make-Good-Neighbors-1[1].jpg](https://cdn.geo-matching.com/vRMO2Edp.jpg?w=320&s=a6108b2726133ff723670b57bc54c812)




{kind=link}