


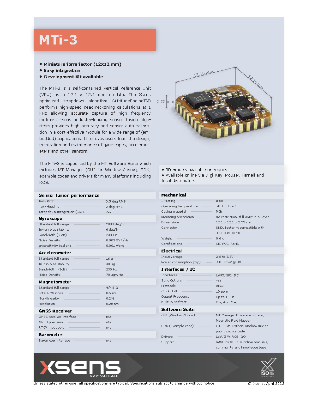
Xsens MTi-3
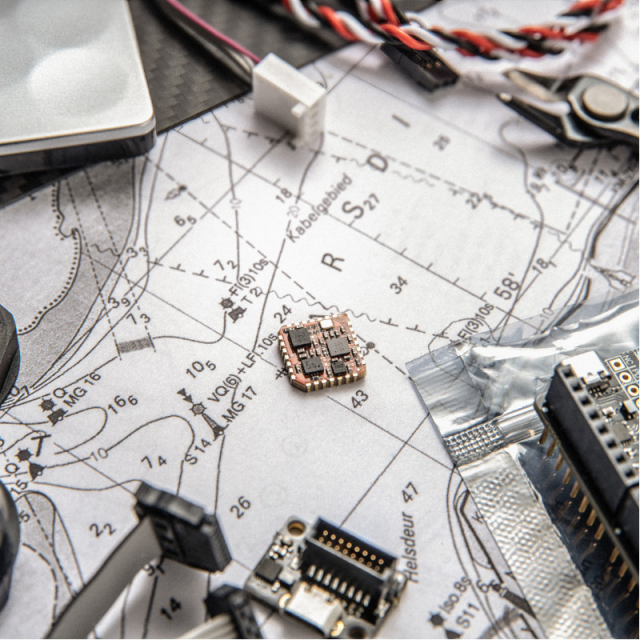
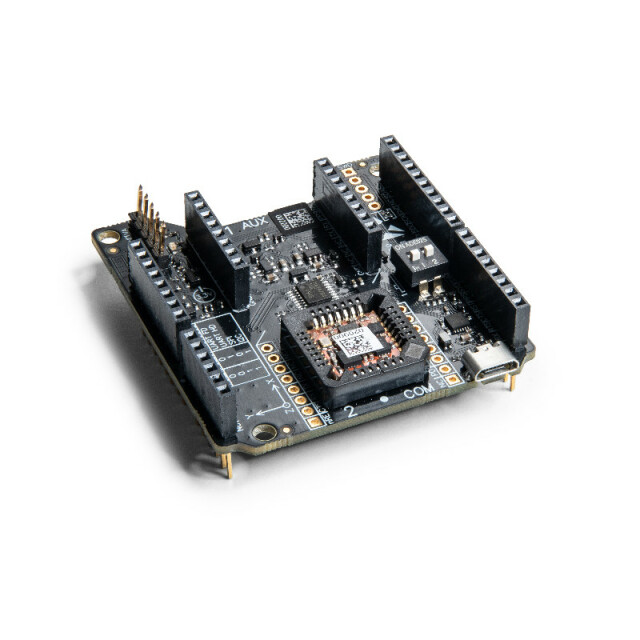
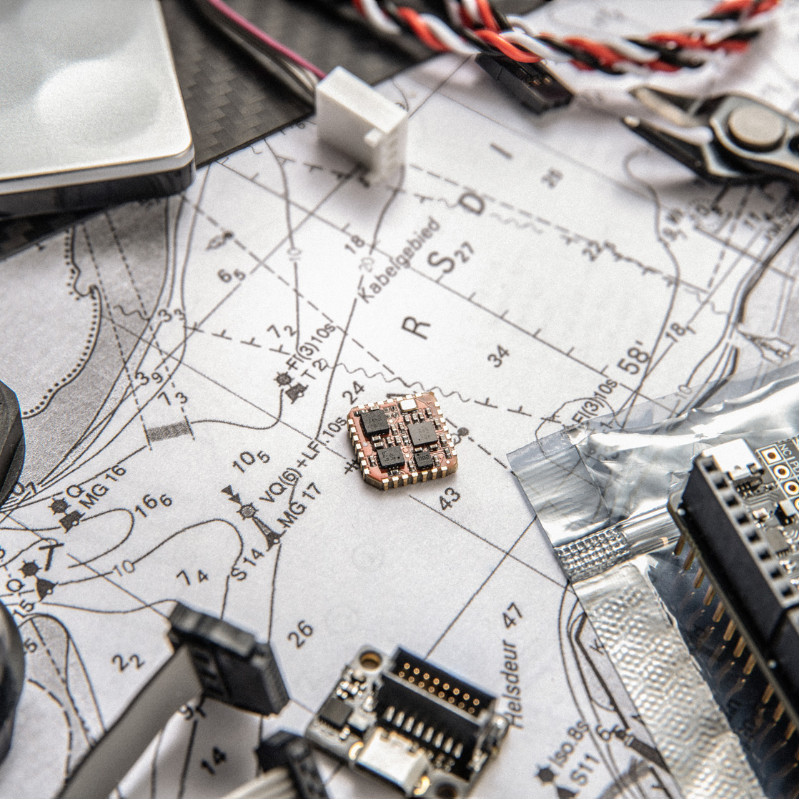
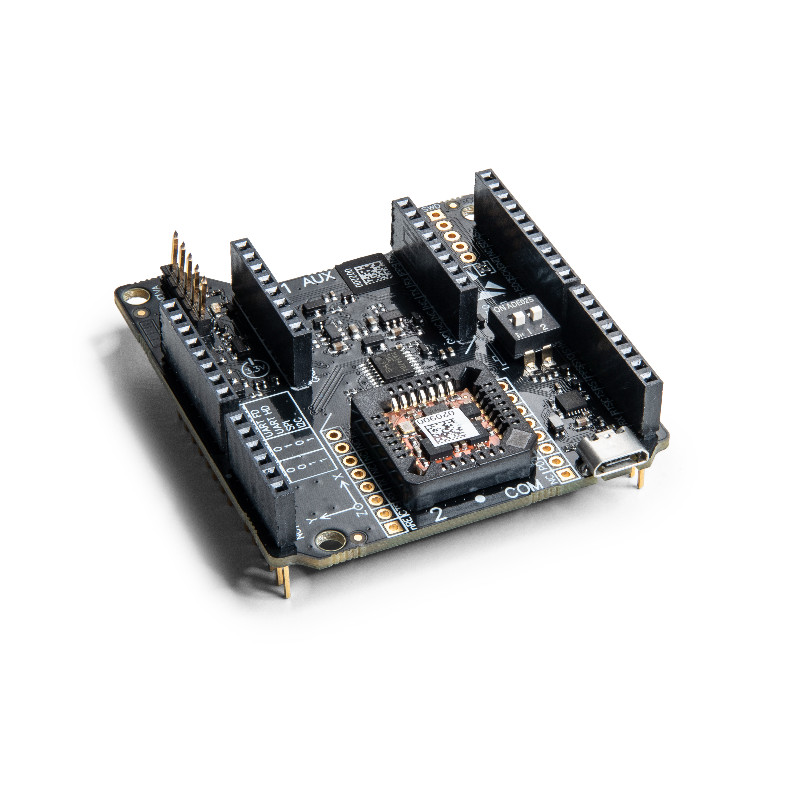
The MTi-3 Is a Self-Contained Attitude Heading and Reference System (AHRS) As a 12.1 X 12.1 MM Module
The Xsens optimized strapdown algorithm (AttitudeEngineTM) performs high-speed dead-reckoning calculations at 1 kHz allowing accurate capture of high frequency motions. Xsens’ industry-leading sensor fusion algorithm provides high accuracy and sensor auto-calibration in a cost-effective module for a wide range of (embedded) applications.

Movella
Enschede, NL
Description
About the MTi-3
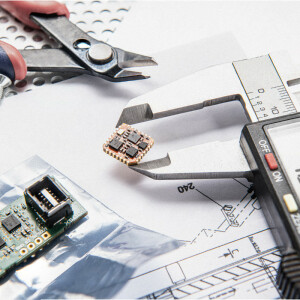
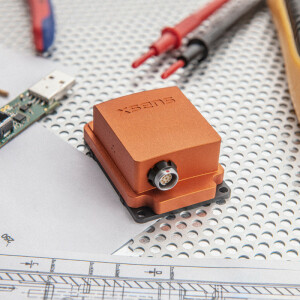
The MTi-3 is a self-contained Attitude and Heading Reference System (AHRS). In addition to the data collected and computed by the MTi-1 and the MTi-2, it delivers true North-referenced yaw, or heading. As a member of the MTi 1-series, the MTi-3 stands out for its small form factor (12.1mm x 12.1mm), easy integration, low cost and robustness – as well as its strapdown integration algorithm. Suitable for a wide range of (embedded) applications, the MTi-3 relieves you of the effort of integrating and maintaining gyroscopes, accelerometers and other sensors as well as of having to design an all-in-one AHRS solution.
MTi-3 Software
Our MT Software Suite has everything you need to operate the MTi-3. The suite contains a specially developed, easy-to-use graphical user interface, as well as drivers for various operating systems. It also offers other useful tools and software programs, such as:
- MT Manager (GUI)
- MT SDK, including programming examples for C, C++, C#, MATLAB, Python, ROS and Nucleo boards
- Magnetic Field Mapper (MFM) calibration tool, as GUI and SDK
The suite comes with complete documentation. Of course, you can also always contact our technical support staff.
Do you have questions about this product?
- Questions about price, availability, and/or retailers
- Questions about technical specifications and usage
- Questions about suitability for your project or application
Specifications
-
Physical Properties
-
Operating temperature: min. [°C]
-40
Max. operating temperature [°C]
85
Width [m]
12.1
Length [m]
12.1
Height [m]
2.55
Weight [kg]
0.001
-
aTtitude
-
Range
360 deg
Accuracy
0.5 deg
-
Heading specifications
-
Range
360 deg
Accuracy
2 deg RMS
-
Angular Rate
-
Range: Roll, Pitch, Yaw (°/sec)
2000
Bias Instability (°/hr)
6
Angle Random Walk
0.003 deg/s/sqrt(Hz)
Bandwidth (Hz)
230
-
Acceleration
-
Axis
X, Y, Z
Range (g)
16
Bias Instability (mg)
0.04
Velocity Random Walk
70 ug/sqrt(Hz)
Bandwidth (Hz)
230
-
Magnetic Field
-
Axis
X,Y,Z
Range (Gauss)
8
Resolution (mGauss)
0.25
Noise Density (mGauss /√Hz)
0.5 mG (total RMS noise)
Documents
Brochure
MTi-3.pdf







{kind=link}