


Xsens MTi-7
Miniature GNSS/INS Module
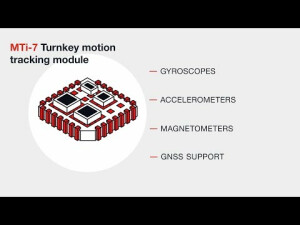
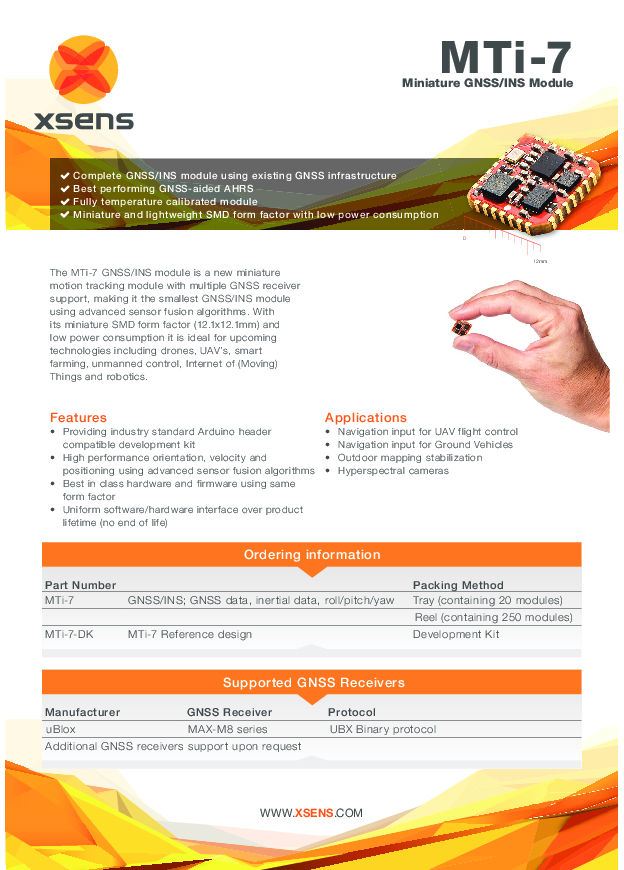
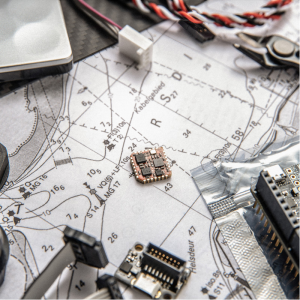
The MTi-7 is a miniature GNSS/INS as a 12.1 x 12.1 mm module with an interface to an external GNSS receiver. The Xsens optimized strapdown algorithm (AttitudeEngineTM) performs high-speed dead-reckoning calculations at 1 kHz allowing accurate capture of high frequency motions. Xsens’ industry-leading sensor fusion algorithm provides high accuracy and sensor auto-calibration in a cost-effective module for a wide range of (embedded) applications.

Movella
Enschede, NL
Description
About the MTi-7
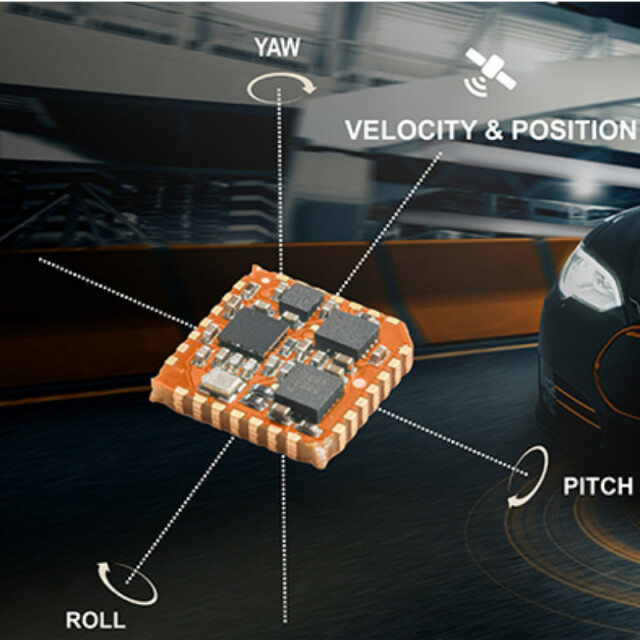
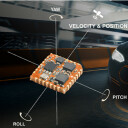
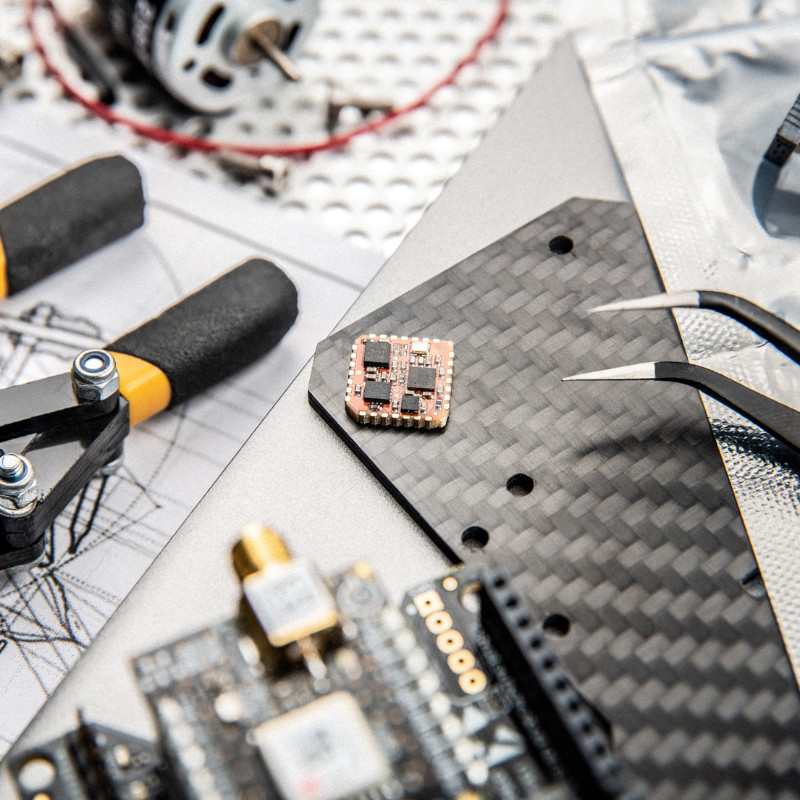
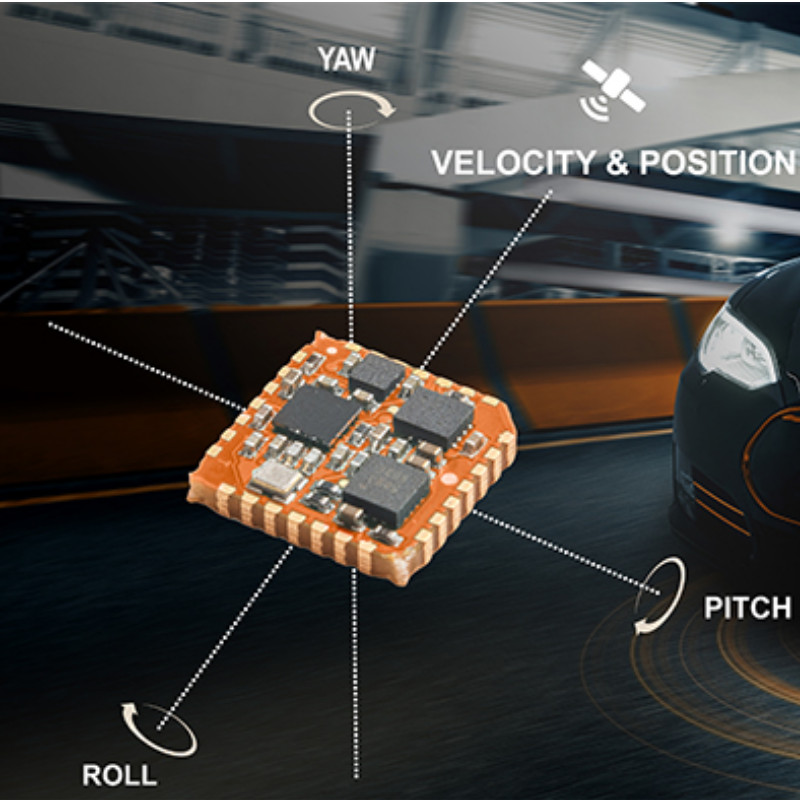
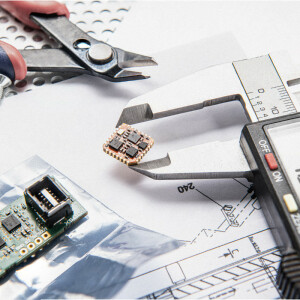
The MTi-7 is a self-contained GNSS/INS (Global Navigation Satellite System/Inertial Navigation System). The MTi-7 uses advanced sensor fusion algorithms developed by Xsens to synchronize the inputs from the module’s on-board accelerometer, gyroscope and magnetometer with the data from an external GNSS receiver and/or barometer. The raw sensor signals are combined, and processed at a high data rate of 100 Hz, to produce a real-time data stream with the device’s 3D position, velocity and orientation (roll, pitch and yaw). As a member of the MTi 1-series, the MTi-7 is the smallest motion tracking module of its kind (12.1x12.1mm). It also stands out because of its easy integration, low cost, robustness and strapdown integration algorithm. Suitable for a wide range of (embedded) applications, the MTi-7 relieves you of the task of designing, integrating and maintaining gyroscopes, accelerometers and other sensors for GNSS/INS functionality.
MTi-7 software
Our MT Software Suite gives you full access to the MTi-7. It has a specially developed, user-friendly graphical interface, and drivers for various operating systems. Other tools and programs in the MT Software Suite include:
- MT Manager (GUI)
- MT SDK, including programming examples for C, C++, C#, MATLAB, Python, ROS and Nucleo boards
- Magnetic Field Mapper (MFM) calibration tool, as GUI and SDK
Complete documentation is also part of the package and you can always contact our technical support staff for additional support.
Do you have questions about this product?
- Questions about price, availability, and/or retailers
- Questions about technical specifications and usage
- Questions about suitability for your project or application
Specifications
-
Other specifications
-
Graphical user interface
Y
-
Environmental
-
Min. operating temperature [°C]
-40
Max. operating temperature [°C]
85
-
Software
-
Name
XKF700 sensor fusion
Filtering
Y
-
GNSS aided uncertainty
-
Heading [deg]
1.5
Pitch [deg]
0.5
Roll [deg]
0.5
-
General
-
Type of application
Air, Land, Marine, Space
Year of initial development
2018
Height [m]
0.0025
Width [m]
0.0121
Length [m]
0.0121
Weight [kg]
0.001
Power consumption [W]
0.1
Splashproof casting
N
Water resistant casting
N
Mean time between failures [hr]
130000
Removable from base plate
N
Moving parts
N
Height [mm]
2.55
Width [mm]
12.1
Length [mm]
12.1
Min. Voltage (DC)
2.8
Max. Voltage (DC)
3.6
Type of accelerometer
MEMS
Type of gyro
MEMS
-
GNSS Positioning Sensor
-
Number of integrated GNSS receivers and antenna ports
0
-
Unaided uncertainty
-
Heading [deg]
2
Pitch [deg]
0.5
Roll [deg]
0.5
-
Data formats
-
NMEA formats
Various, incl. GGA, RMC
RTCM
N
Other
Xbus, NMEA
-
Inertial Measurement Unit
-
Accelerometer bias [µ-g]
40
gyro bias [deg/hr]
6
Calibration procedure
Magnetic calibration (optional)
-
GNSS positional accuracy
-
Horizontal Position Accuracy [ RMS in cm ]
100
Documents
Brochure
91143-xsens-2018-leaflet-mti-7-a4-eu-web.pdf
1.38 MB
Videos








{kind=link}