

UgCS - Universal Ground Control Software for drones
Drone Survey Planning and Flight Control Software
UgCS is one of the world's leading flight planning software solutions for drones with users in more than 150 countries. Since 2013 the team has constantly been working to make UgCS better and meet the requirements of even the most demanding professional drone pilots and surveyors. What sets UgCS apart from other flight planning solutions is that flight planning is done on PC/Mac, it is installed locally and can be used offline. UgCS is also fast, gives a 3D environment.

SPH Engineering
Balozi, LV
Description
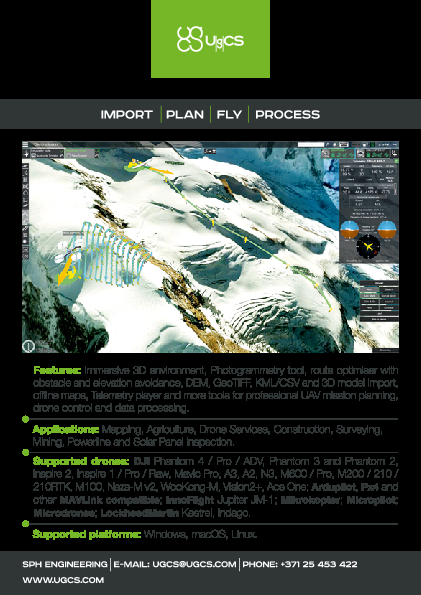
Main features
✓ UgCS automatic LiDAR toolset for drone surveying
✓ Terrain following
✓ Route import from KML or CSV files
✓ UgCS Photogrammetry tool
✓ UgCS Vertical scan tool for drone surveys
✓ Area Scan tool for geophysical sensors with UgCS
✓ Corridor mapping, SAR patterns
✓ Import custom map and terrain elevation data
✓ Live geotagged video stream from drone with UgCS ENTERPRISE
✓ Work offline
Supports most popular UAV platforms including DJI M350, M300, M600, M2X0, Inspire, Phantom series, Mavic series, and MAVLink-compatible drones (Pixhawk with ArduPilot/PX4 firmware).
Do you have questions about this product?
- Questions about price, availability, and/or retailers
- Questions about technical specifications and usage
- Questions about suitability for your project or application
Specifications
-
General
-
Area of Application
Land Surveying, Mapping, Inspection (e.g. solar panel, powerline), Agriculture, Drone Services, Construction, Mining
Mobile platform support
Android
Compatible drones
DJI: M600/600 Pro, M350, M300, M200/210/210RTK, M100, Inspire 2/1/1Pro/Raw, Phantom 4/4Pro/4ProV2/4RTK with SDK controller only, Phantom 3, Mavic Pro/2 series, Spark, N3, A3; Ardupilot, Px4 and other MAVLink compatible multirotors, fixed wings and VTOLs; Mikrokopter; Micropilot; LockheedMartin: Kestrel, Indago.
Desktop platform support
Windows, macOS, Ubuntu
-
Flight Planning Characteristics
-
Mission flying types (grid, around point of interest, custom route, corrider etc.)
>>>Waypoint - custom route; >>>Area scan and Photogrammetry with single/double grid; >>>Circle - around the point of interest; >>>Perimeter; >>>Click and go. (Mission types can be combined in one route. Photogrammetry route optimization based on camera type.)
Auto-return and resume from left off
Y
Mission progress monitoring
Flight time, flight distance, waypoint count
Real-time flight status
Y
No-fly zone integration
Y
Multi-flight mission support
Y
Multiple UAS support
Multi-drone support is enabled (these can be diverse vendor drones).
3D flight planning
Y
Live weather updates
N
Map-catching and offline planning
Y
Data import types
KML/CSV, DEM, Geo-Referenced Images, KMZ import with embedded COLLADA 3D models
Background map options (WMS, importable)
Y
Multi-operator support
Y
Show camera footprint on map
Y
Flight modes
Automatic, Semi-Automatic, Manual
-
Additional Features
-
Customer support
Public forum, E-mail, Phone.
ADS-B support
Y
User interface language
English, French, German, Latvian, Russian, Spanish, Chinese
Distinguishable features
Flexible licensing model and broad fleet management feature set make UgCS suitable for organizations of a different scale: from single professional operator to large enterprise with UAV department.
Offline sharebale flight planning
Y
-
Requirements
-
Hardware
CPU: Core 2 Duo or Athlon X2 at 2.4GHzMinimum RAM 2GB, recommended 4GBHard drive: 2 GB of free spaceGraphics hardware: Graphics card with DirectX 9 support (shader model 2.0). Any card made since 2004 should work.Network: TCP/IPv4 network stackScreen resolution: Minimum supported screen resolution: 1024x768
Software
Operating system:Windows 7 with SP1 or later; Windows 8* / 64-bit,Mac OS X Maverick 10.9 or later* / 64-bit,Ubuntu 16.04 LTS / 64-bit"To connect DJI: Phantom 4/4 PRO/4 ADV, Phantom 3 (all editions), Inspire 2, Inspire 1, A3, N3, Matrice 600/600 PRO, Matrice 200/210/210RTK, Matrice 100, Mavic Pro drones with UgCS desktop the Android application UgCS for DJI (free) is required.
-
Geo-referencing
-
Base station integration
Y
Geo-referencing of captured data
Y
Image geotagging
Y
-
Data Capturing
-
Payload manager (for different sensor configurations)
Y
Post-flight data quality check
Display image centers on the map; UgCS Mapper - a desktop geo-referenced image processing software, to create 2D maps in-field, requiring no internet connection.
Manual photo control
Y
Vertical and oblique photoshooting
Y
Live video streaming
Enabled video stream broadcast for DJI Phantom 4, 3; Inspire 1, Matrice 600 and Matrice 100 from UgCS for DJI application to UgCS Desktop
Photogrammetry planner
Y
Automated camera support
Y
-
Data Output
-
Export data to cloud applications tool
Y (starting from UgCS 2.14)
Output products
Geotagged images, Flight logs, Geotiff, Orthophoto map and starting from UgCS 2.14 Point cloud.
Replay flights
Y
Output files
GIF, XML, LAS
Documents
Brochure
migrationzym9zz.pdf
703.79 KB
Other documents
-
Product Manual (183)13.77 MB










{kind=link}