
VectorNav GNSS/INS Systems for Aerial Photogrammetry
Aerial photogrammetry is expanding into new applications and end uses that were previously too costly or impractical. Professional photogrammetry can produce outputs with horizontal (x,y) accuracies in the range of 1 cm (0.4 in) and elevation (z) accuracies of 2 to 3 cm (0.8 to 1.2 in), which enables precise volumetric analysis. In this section, we are going to focus on photogrammetry and the advantages of using a GNSS/INS to provide a more efficient and cost-effective aerial mapping.
Advantages of Using a GNSS/INS for Aerial Photogrammetry
Photogrammetry is the estimation of the geometric and semantic properties of objects based on images or observations from similar sensors. What this translates to is that photogrammetry is the process of taking measurements of distances, areas, and volumes of an environment based on photographs taken from various vantage points. These measurements can then be used to produce an orthophoto map (Orthomosaic), Digital Surface Model, or 3D point cloud.
Legislative changes and advancements in UAV technology, size and weight reduction in sensors, and advances in compact data storage/transmission has seen significant growth in UAV aerial photogrammetry. Aerial photogrammetry is expanding into new applications and end uses that were previously too costly or impractical. Professional photogrammetry can produce outputs with horizontal (x,y) accuracies in the range of 1 cm (0.4 in) and elevation (z) accuracies of 2 to 3 cm (0.8 to 1.2 in), which enables precise volumetric analysis. In this section, we are going to focus on photogrammetry and the advantages of using a GNSS/INS to provide a more efficient and cost-effective aerial mapping.

Figure 1: Photogrammetric Digital Terrain Model
Building Digital Elevation Model From Images
Georeferencing (Georectification) is the process of applying a coordinate system to an image so that it can be accurately located on a map. In order to georectify an image the camera orientation and position, or Exterior Orientation Parameters (EOP), need to be known for every image in order to create a planimetrically correct image that can be used for Geographic Information System (GIS) analysis. EOPs include 6 parameters, three rotational angles:
- Omega (ω) (Roll)
- Phi (φ) (Pitch)
- Kappa (κ) (Yaw),
and three position coordinates for X, Y and Z.
Aerial Triangulation (AT) is the process used to determine EOPs from captured images. In order to achieve successfully AT the mission plan (intended flight path), needs to ensure that there will be sufficient overlap of adjacent images. Typically a 60-80% forward lap and 30-60% side lap is required to ensure sufficient data is collected to generate a suitably accurate surface model.
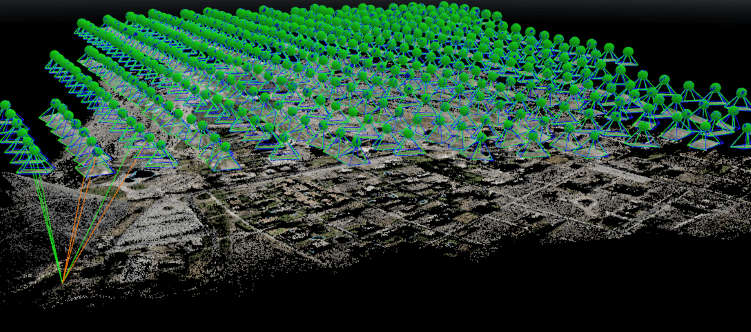
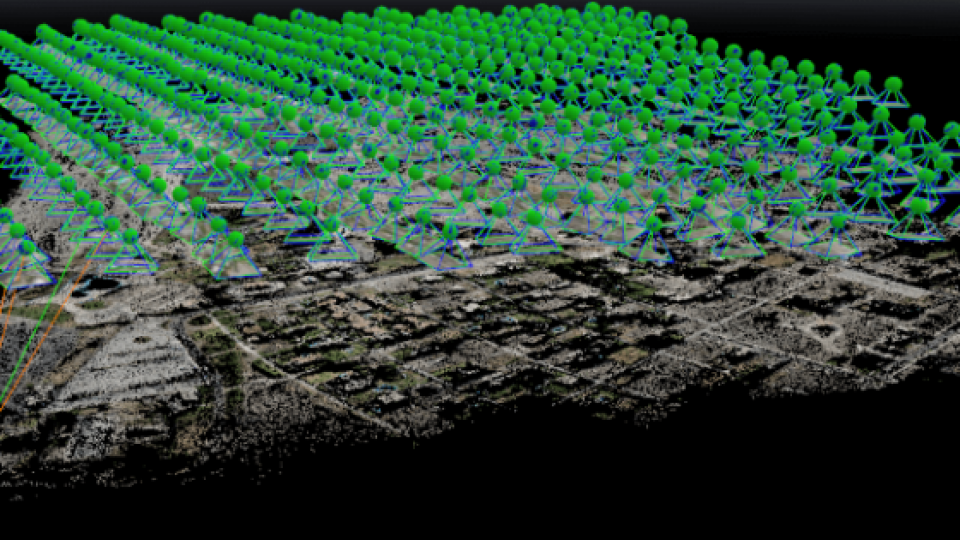
Figure 2: Images
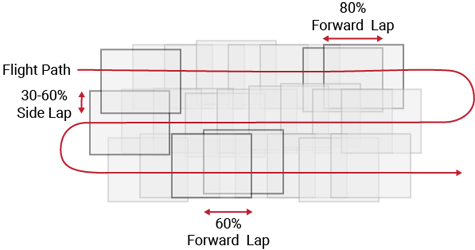
Figure 3: Image overlap requirements for Aerial Triangulation
AT is the process of image block adjustments with images that contain information from well distributed and accurately known ground control points (GCPs) and tie points.
- Tie Points are visual features common to multiple images that can be used to orient each image with respect to each other.
- Ground Control Points (GCP) are visual markers placed on the ground with precisely known geographic coordinates. The positional accuracy of the GCPs will dictate the overall absolute accuracy of the photogrammetric process
Bundle Adjustment is the final step in generating 3D reconstructed models. Using the Tie Points and GCPs the bundle adjustment computations calculate the EOPs for each image. First images are oriented and combined to form an image block using the tie points, such as one of the strips in Figure 2. This block is then adjusted to fit the ground using the GCPs. This is a simultaneous process of refining image coordinates, camera parameters (Interior Orientation Parameters) and EOPs using collinearity equations to find the best statistical fit.
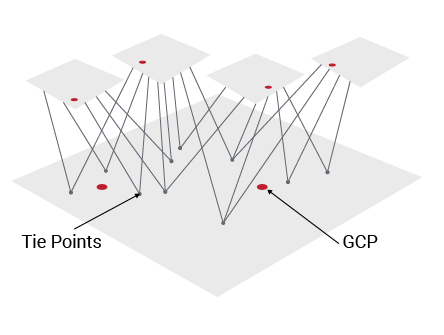
Figure 4: Tie Points and Ground Control Points for Aerial Triangulation
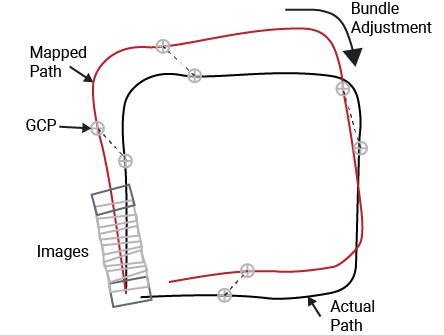
Figure 5: Bundle Adjustment to fit mapped
Modern software tools such as Pix4D and ArcGIS automate the complex AT process and can take advantage of the processing power of cloud-based servers to complete the heavy computational load relatively quickly. Once the bundle adjustment is complete a photogrammetric point cloud, or density cloud can be created which is then meshed (filled between points) to form a Digital Elevation Model (DEM).
Direct Georeferencing and Sensor Selection
Direct Georeferencing (DG) on the other hand is the direct observations of the exterior orientation (EO) of the imaging sensor using GNSS receivers and inertial measurement sensors. The GNSS receivers provide position (x, y, z) information and inertial sensors orientation (ω, φ, κ) data. Some of the advantages of DG is that it reduces the number of Ground Control Points required (possibly eliminating their need completely), speeds the selection of tie points and reduces the time to configure the project. In summary, DG offers efficiency improvements throughout the mapping workflow, from the field to data processing.
In order to determine which sensor would be most suitable for DG, we need to determine some important performance and operating criteria based on the mapping requirements.
- Low payload size, weight and power (SWaP): draw less than 1W and a weight that is less than 60 grams
- Dual GPS antennas for low dynamic (low operating speed < 5m/s) heading accuracy
- PPS (pulse per second) output or other I/O for time synchronization with an imaging sensor
In order to achieve survey-grade photogrammetry results, it is necessary to use GNSS Receivers capable of either Real-Time Kinematic (RTK) or Post-Processed Kinematic (PPK) corrections to determine image coordinates to less than 1cm.
RTK positioning requires a robust communication link between the GNSS Base Station and the imaging sensor GNSS in order to transmit real-time correction data to the camera UAV. Additionally, the GNSS Base Station must be correctly configured and surveyed-in for the most accurate result. The requirement for an active link poses operational challenges for long-range mapping applications and especially when Line of Sight (LOS) cannot be maintained.
Photogrammetry Application Note
To learn more about Aerial Photogrammetry, the advantages and limitations of photogrammetry, the practical limitations of using photogrammetry for surveying and the impact of GNSS/INS on photogrammetry accuracy. Please download VectorNav's application note.
DOWNLOAD
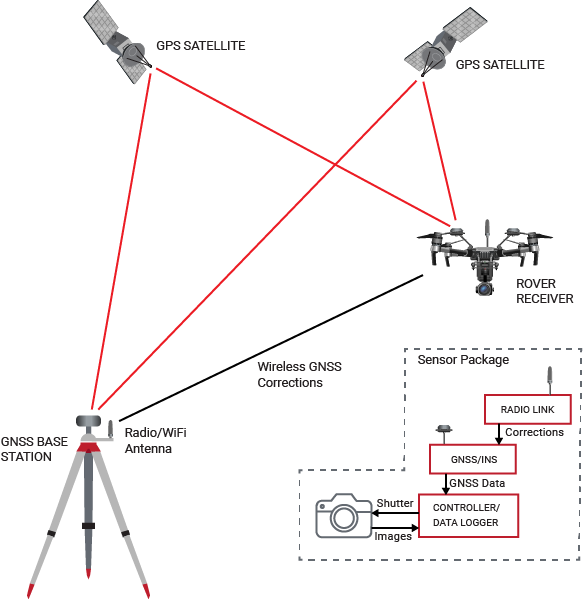
Figure 6: RTK Diagram
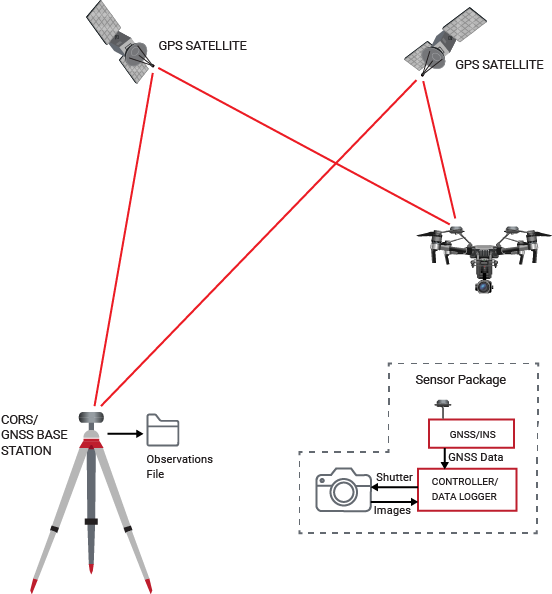
Figure 7: PPK Diagram
Given that an aerial mapping system requires onboard data logging for all images and GNSS data, it is therefore advantageous to pursue the PPK workflow as this simplifies the operation. PPK does not require a communication link between the UAV and base station, and can also provide more accurate positioning data compared to RTK by utilizing precise satellite ephemeris data and forward/backward smoothing techniques.
Do you have questions about this article?
Get in touch with VectorNav Technologies, and they would be happy to answer any questions you have about pricing, suitability, availability, specs, etc.
Related articles










{kind=link}