




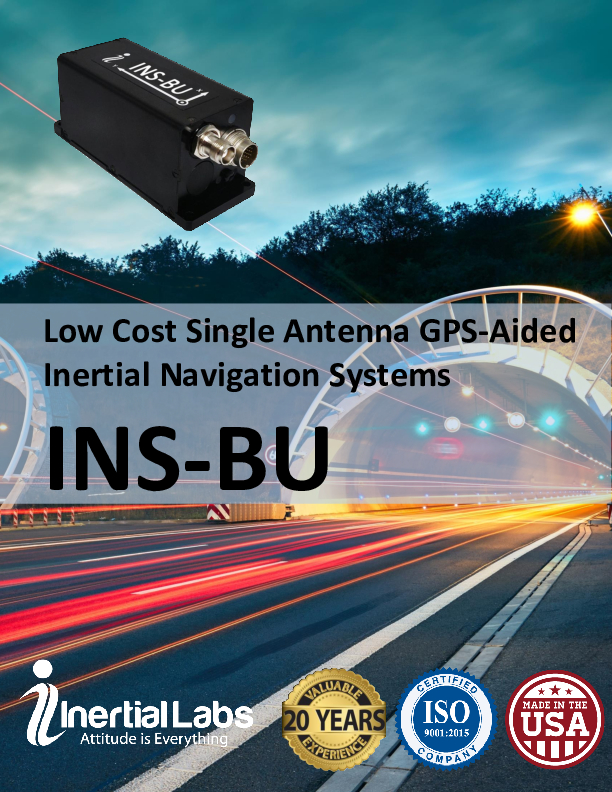
INS-BU – Single Antenna u-blox GNSS Inertial Navigation System
Low Cost Single Antenna GPS-Aided Inertial Navigation System Utilizing u-Blox GNSS Receiver and miniAHRS
Low Cost Single Antenna GPS-Aided Inertial Navigation System Utilizing uBlox GNSS Receiver with 1 cm RTK position and miniAHRS

Inertial Labs, Inc.
Paeonian Springs, US
Description
Input signals:
Marine application: DVL (Doppler Velocity Log)
Land application: Odometer, Wheel sensor, Encoder, DMI
Aerial application: Wind sensor, Air Speed Sensor, Doppler shift from locator (for long-term GPS denied) External Stand-Alone Magnetic Compass (SAMC/AHRS)
Output signals:
Horizontal and Vertical Positions, Heading, Pitch & Roll, Velocity, Accelerations, Angular rates, Barometric data, PPS
Direct AT_ITINS message with Position, Heading, Pitch & Roll to COBHAM AVIATOR UAV 200
Direct Navigation Support for Pixhawk Flight Controllers as NMEA messages
Do you have questions about this product?
- Questions about price, availability, and/or retailers
- Questions about technical specifications and usage
- Questions about suitability for your project or application
Specifications
-
Other specifications
-
Export restrictions
No
Graphical user interface
Y
Typical application
UAV, UUV, UGV, AGV, ROV
Distinguishable features
Aiding Data, Low Cost, RTK 1 cm Position
-
Environmental
-
Non-operating shock tolerance [g]
5000
Operating shock tolerance [g]
1500
Min. operating temperature [°C]
-40
Max. operating temperature [°C]
85
Max. rotation speed [deg/s]
450
-
Software
-
Name
GUI Software
Filtering
Y
Adaptable filter strength
Kalman
Adaptable input signals
Y
Integrity monitoring of position input
Y
Integrity monitoring of log input
Y
Max. number of position input signals
10
Max. number of log input signals
10
Maximum latency of log input [ms]
3
Maximum latency of position input [ms]
3
Uncertainty indicators given in output
Yes
Uncertainty of time stamp for output [ms]
0.02
-
GNSS aided uncertainty
-
Heading [deg]
0.3
Pitch [deg]
0.05
Roll [deg]
0.05
-
General
-
Type of application
Air, Land, Marine
Year of initial development
2021
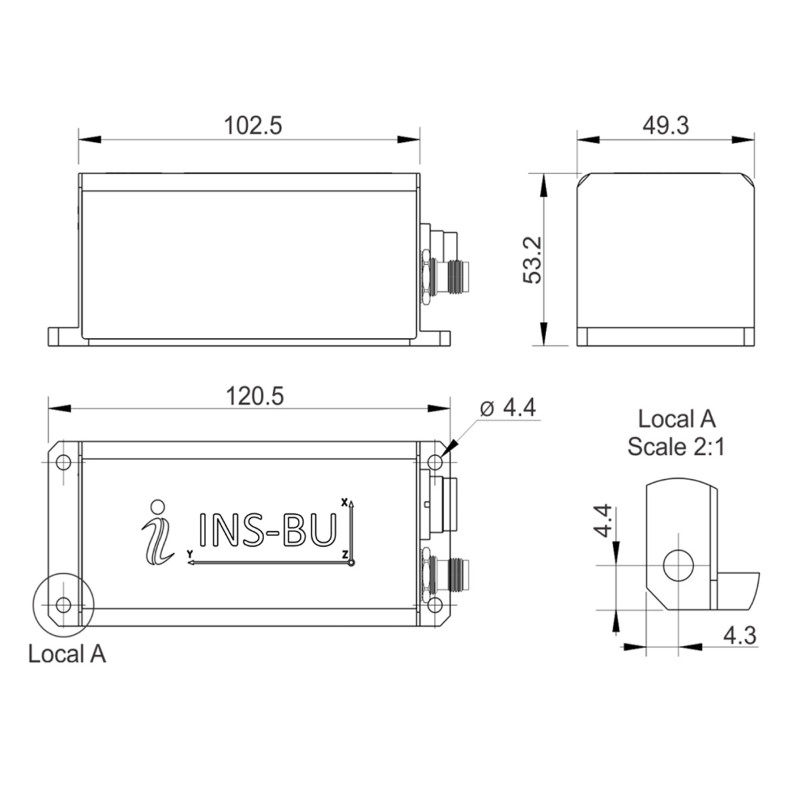
Height [mm]
53.2
Width [mm]
49.3
Length [mm]
120.5
Weight [kg]
0.32
Min. Voltage (DC)
9
Max. Voltage (DC)
34
Power consumption [W]
6
Splashproof casting
Y
Water resistant casting
Y
Mean time between failures [hr]
55.5
Type of accelerometer
MEMS
Type of gyro
MEMS
Removable from base plate
N
Moving parts
N
-
GNSS Positioning Sensor
-
Number of integrated GNSS receivers and antenna ports
1
No. channels p receiver
184
Tracked satellite signals
All Constellations
SBAS differential signals
Yes
RTK Network Compatibility
Yes
Update rate [ Hz ]
200
Cold start [ seconds ]
50
Hot start [ seconds ]
30
-
Data formats
-
NMEA formats
NMEA 0183
RTCM
Y
Other
Binary, ASCII
-
Inertial Measurement Unit
-
Accelerometer bias [µ-g]
5
gyro bias [deg/hr]
2
-
GNSS positional accuracy
-
Horizontal Position Accuracy [ RMS in cm ]
120
Horizontal Position Accuracy (RTK) [ RMS in cm ]
1
Documents
Brochure
ins-bu-datasheet-rev1-1-sept-2021.pdf
1.28 MB
Videos


![YRBKMWXn[1].png](https://cdn.geo-matching.com/En53gY1o.png?w=300&h=300&crop=1&s=024b01a5456af84a24979824702460d7)





{kind=link}