

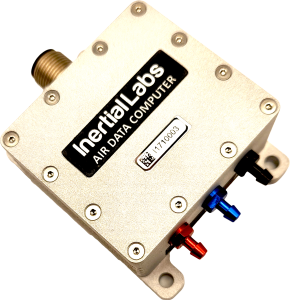
Description
Specifications
-
Other specifications
-
Graphical user interface
Y
Typical application
Extends the functionality of your existing GNSS system to provide very accurate roll, pitch, heading and heave for applications of Hydrographic survey; Bridge, dam and harbour inspection; Dredging, Offshore renewable energy; Environmental survey; Marine construction and Shipping channel survey.
Distinguishable features
5 Models within the series;F175-T1F175-T2F175-HF175-OF175-S
Export restrictions
Commercially Exportable
-
Environmental
-
Operating shock tolerance [g]
100
Max. rotation speed [deg/s]
100
Min. operating temperature [°C]
-10
Max. operating temperature [°C]
50
-
Software
-
Name
CodaOctopus Motion Control
Filtering
Y
Adaptable filter strength
Y
Adaptable input signals
Y
Integrity monitoring of position input
Y
Max. number of position input signals
2
Uncertainty indicators given in output
Y
Uncertainty of time stamp for output [ms]
0
-
GNSS aided uncertainty
-
Heading [deg]
0.1
Pitch [deg]
0.025
Roll [deg]
0.025
Heave: constant part [m]
0.05
Heave: variable part [%]
5
Increase in position uncertainty w.r.t. stand-alone GPS [m]
1.5
-
General
-
Year of initial development
2003
Height [m]
0.076
Width [m]
0.12
Length [m]
0.234
Weight [kg]
2.3
Min. Voltage (AC)
110
Max. Voltage (AC)
240
Min. Voltage (DC)
9
Max. Voltage (DC)
18
Power consumption [W]
15
Splashproof casting
N
Water resistant casting
N
Mean time between failures [hr]
35000
Type of accelerometer
Servo
Type of gyro
MEMS
Removable from base plate
Y
Type of application
Marine
Moving parts
N
-
Data formats
-
NMEA formats
GGA GGK GST HDT RMC ROT VTG ZDA PASHR PRDID
RTCM
Y
Other
CMR; CMR+; TSS1; EM1000; EM3000; MCOM; TSSHHRP
-
Inertial Measurement Unit
-
Accelerometer bias [µ-g]
2
gyro bias [deg/hr]
2
Calibration procedure
Self Calibrating







{kind=link}