


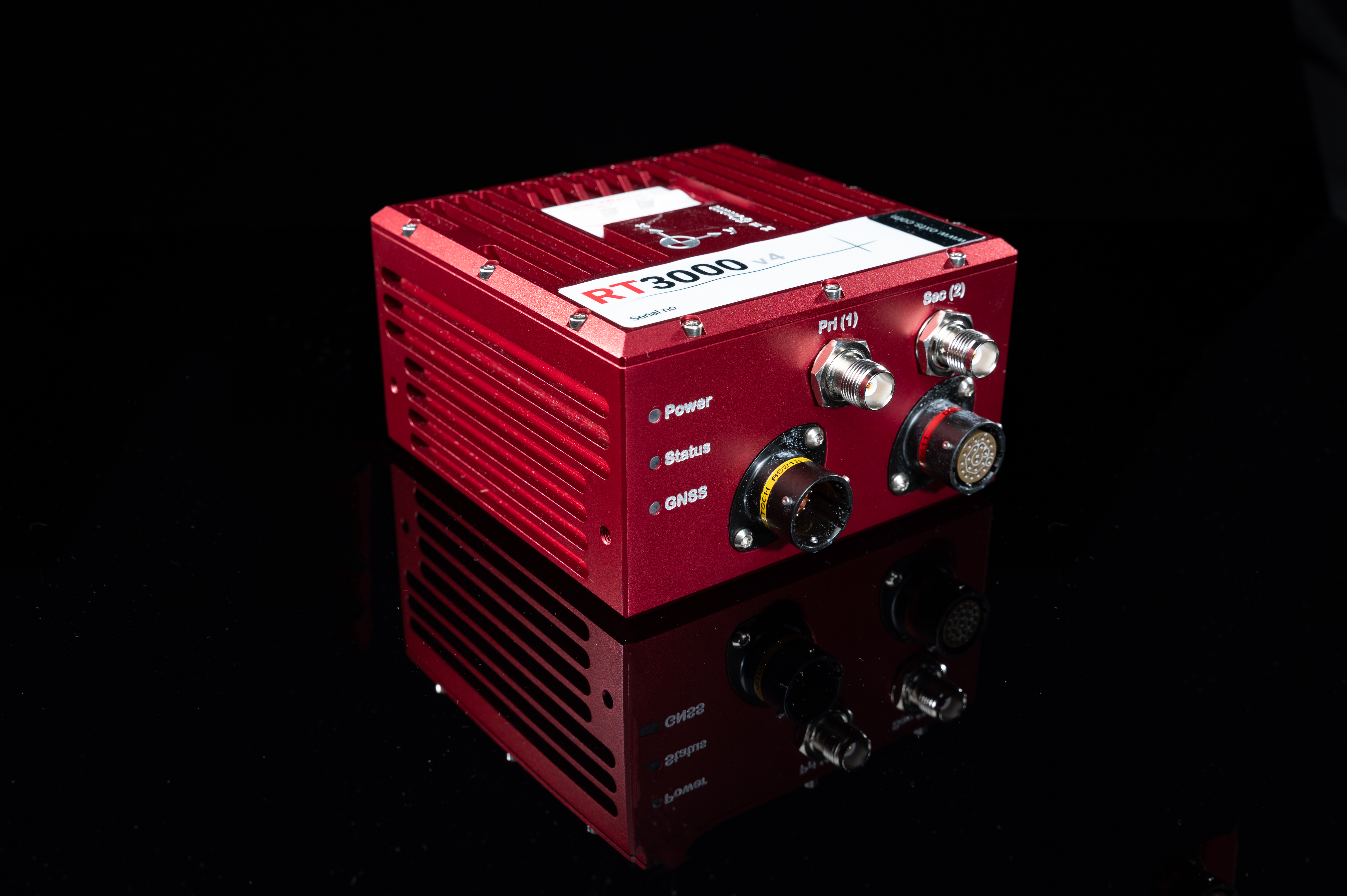
RT3000 v4 GNSS/INS
For when where matters most
Combining survey-grade GNSS positioning with OxTS’ best ever inertial measurement unit, the RT3000 v4 offers a robust, out-of-the-box navigation solution for uninterrupted position, orientation and motion data in all environments.

Oxford Technical Solutions - OxTS
Bicester, GB
Description
Through powerful software integrations and flexible feature code options, you can build your RT3000 v4 from the ground up to become the ideal partner for your specific application.
The RT3000 v4 and OxTS Georeferencer
Integration with OxTS’ LiDAR georeferencing software, OxTS Georeferencer, allows you to confidently georeference LiDAR data from a wide range of sensors, to create clear and concise pointclouds.
An optional boresight calibration tool allows you to align the coordinate frames of your LiDAR and GNSS/INS device for ultimate pointcloud precision, whilst the LiDAR Inertial Odometry feature.
OxTS LiDAR Inertial Odometry (LIO)
OxTS LIO, is an optional feature of OxTS INS devices that uses LiDAR sensor data to improve vehicle trajectory measurements. The enhanced measurements are then used to constrict position drift in the absence of GNSS.
Using LIO in urban canyons will increase the percentage of accurate, usable pointcloud data.
Why choose the RT3000 v4?
Reliable, real-time data
By combining two survey-grade GNSS receivers with OxTS’ latest IMU10 inertial technology, the RT3000 v4 delivers consistent, reliable and accurate position, orientation and dynamics data in all environments.
ITAR-free
Ship your RT3000 v4 globally without requiring export licenses. Leveraging advancements in OxTS’ navigation engine the RT3000 v4 achieves a new level of performance using components that are not subject to export controls.
Low dynamics warm-up
The RT3000 v4 gets to specification in within three minutes of low dynamic movement meanng you no longer need to find the time and space required for high-dynamics manoeuvres.
Post-processing tools included
Avoid the hassle of subscription licence renewals with OxTS’ complimentary post-processing tools. NAVsuite, contains all of the applications you need for device configuration, real-time monitoring, post-processing and data visualisation.
Do you have questions about this product?
- Questions about price, availability, and/or retailers
- Questions about technical specifications and usage
- Questions about suitability for your project or application
Specifications
-
Other specifications
-
Export restrictions
None
Graphical user interface
Y
Typical application
Multiple
-
Environmental
-
Max. operating temperature [°C]
70
Min. operating temperature [°C]
-40
Non-operating shock tolerance [g]
100
-
GNSS aided uncertainty
-
Heading [deg]
0.04
Pitch [deg]
0.01
Roll [deg]
0.01
-
General
-
Height [mm]
71
Length [mm]
120
Moving parts
N
Power consumption [W]
6
Removable from base plate
N
Splashproof casting
Y
Type of accelerometer
MEMS
Type of application
Land, Air, Marine
Type of gyro
MEMS
Water resistant casting
N
Weight [kg]
0.69
Width [mm]
120
Year of initial development
2024
Max. Voltage (DC)
48
Min. Voltage (DC)
10
-
GNSS Positioning Sensor
-
Number of integrated GNSS receivers and antenna ports
2
RTK Network Compatibility
Yes
Update rate [ Hz ]
250
-
Data formats
-
Other
NCOM, MCOM
RTCM
Y
-
Inertial Measurement Unit
-
Accelerometer bias [µ-g]
5
Calibration procedure
ISO17025
gyro bias [deg/hr]
0.8
-
GNSS positional accuracy
-
Horizontal Position Accuracy [ RMS in cm ]
1
Horizontal Position Accuracy (RTK) [ RMS in cm ]
1
Documents
Brochure
RT3000 v4 datasheet.pdf
1014.47 KB

Other documents
-
Land-based LiDAR Surveying.pdf5.67 MB
-
Open-road groundtruth testing.pdf5.01 MB
Videos




{kind=link}