
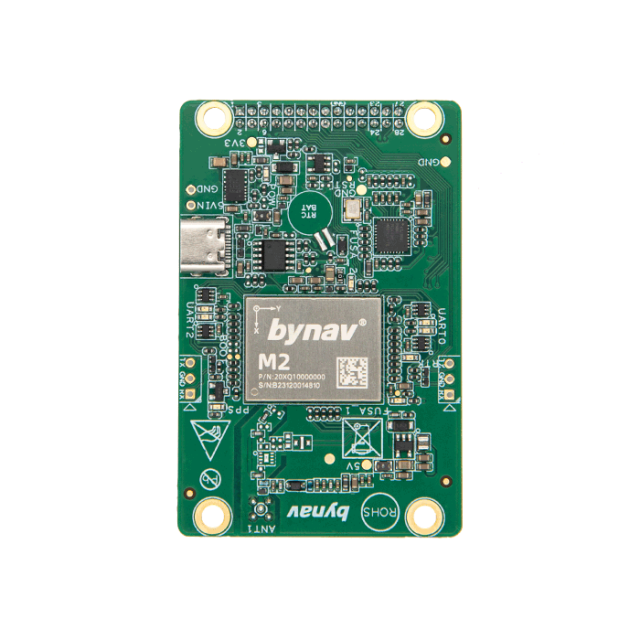
Bynav C2 GNSS RTK Receiver development Board
USB-C PORT, High Precision RTK and Heading
Based on Alice, the new 22nm process high-performance GNSS SOC from Bynav, C2 features high-precision measurement and navigation engine, so it is capable of dealing with harsh environments such as satellite signal interference and outage and providing continuous, real-time and reliable high-precision position.

Bynav Technology
Changsha, CN
Description
Based on Alice, a new generation of high-performance automotive-grade GNSS SOC chip in 22nm process from Bynav Technology, the C2 GNSS high-precision positioning and heading board has a built-in high-precision measurement engine and navigation engine, which can effectively cope with harsh environments such as satellite signal interference and loss, and quickly get the accurate relative position of dual antennas and the angle (azimuth) between the baseline of dual antennas and true north. At the same time, by receiving the differential data of the base station, real-time carrier phase differential positioning (RTK) can be realized, providing continuous, real-time, and credible high-precision position and attitude for the vehicle.
Features
- Based on Bynav GNSS Baseband ASIC Alita and RFIC Ripley.
- Support full-constellation, full-frequency RTK positioning and dual-antenna heading.
- Support modern signal systems such as BDS-3 and Galileo.
- Enhanced connection options including serial, CAN and Ethernet.
- Support GNSS/INS deeply coupled algorithm, raw data output and post processing.
- Support on-board TF card to back-up local data.
- Optimal performance in multipath mitigation, anti-interference and anti-blockage.
- Compact size and low power consumption.
REAL Positioning Engine
To deal with the anomalies of the observations caused by multipath and interference in the urban environment, the integrity monitoring and partial ambiguity resolution algorithm based on RANSAC (Random Sample Consensus) are integrated. The algorithm can monitor the pseudorange, carrier phase and Doppler observations in real time, and can accurately eliminate faulty satellites when there are many abnormal satellites, which improves the fault tolerance and fixed rate, and makes the positioning solution results more robust.
Adaptive Anti-jamming Algorithm Within Self-designed SoC
For anti-interference in complex electromagnetic environments, high-quantization bit signal preprocessing and adaptive interference suppression are carried out for common interference signals from vehicle anti-tracking equipment, radar and airport signal towers, which greatly improves the availability and integrity of high-precision positioning and heading in vehicle scenarios.
NRTK/PPP/PPP-RTK
It supports all NRTK differential services, BDS-3 B2b PPP and prevailing PPP-RTK differential services. It makes full use of the multi-frequency signals of BeiDou, GPS, and Galileo to greatly accelerate the PPP convergence speed and improve the availability of high-precision positioning.
Carrier Semi-cycle Ambiguity Correction Technology
Under dynamic conditions in cities, losing lock of carrier phase and reacquisition are relatively frequent. After the carrier phase is retracked, it is generally necessary for Frame Sync to be completed to remove the semi-cycle ambiguity, then the carrier phase can be used for the full-cycle ambiguity solution. The Bynav receiver integrates the patented carrier semi-cycle ambiguity correction technology based on message prediction and matching, which can quickly eliminate the semi-cycle ambiguity after the satellite signal reacquisition, increase the number of available satellites, and effectively shorten the time to recover from complete signal blockage.
Do you have questions about this product?
- Questions about price, availability, and/or retailers
- Questions about technical specifications and usage
- Questions about suitability for your project or application
Specifications
-
General
-
Depth [m]
0.071
Height [m]
0.011
Total Weight [kg]
0.02
Width [m]
0.046
Type
Aerial, Land, Marine
-
Performance
-
Tracked satellite signals
L-Band* CLAS* BDS:B1I、B2I、B3I、B1C、B2a、B2b(PPP) GPS:L1CA、L1C、L2、L5 GLO:G1,G2 GAL:E1、E5a、E5b、E6 QZSS:L1CA、L1C、L2、L5、L6(PPP) NAVIC(IRNSS):L5 SBAS*:L1CA
No. channels
1507
Reacqisition time [s]
≤30S
-
Environment
-
Humidity resistance
95%non-condensing
Operating temperature: min. [°C]
-40
Operating temperature: max. [°C]
85
-
Communication: general
-
Communication ports
UART ×3 1PPS ×1 EVENT_IN×3 EVENT OUT×3 CAN×1 LAN×1 12C×1
PPS Out
Y
-
Communication: Protocols
-
L-Band Compatible
Y
NMEA output format
Y
Other formats for differential data
RTCM
other output formats
BYNAV
RTCM standards for differential data
Y
-
Horizontal uncertainty
-
Initialization time on the fly [s]
≤5S
-
Power
-
Typical consumption [W]
1
Operating power: max. [V]
3.45
Operating power: min. [V]
3.15
-
More information
-
Distinguishable features
Lower Consumption, Better Dynamic Performance Against Signal Blockage
Documents
Other documents
-
BY_Connect_Upper-computer_Software.zip38.22 MB
More from Bynav Technology




{kind=link}