

PIX4Dmapper
The leading photogrammetry software for professional drone mapping
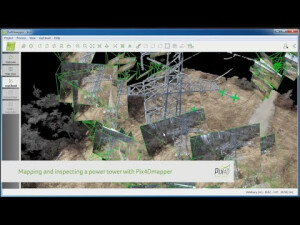
PIX4Dmapper is the photogrammetry software of choice for thousands of professionals, it has proven to be flexible, powerful, and precise. Get a range of outputs including 3D point clouds, digital surface models, orthomosaics, 3D textured models, and thermal imagery. Check out the latest version to boost your mapping workflows. Used in all industries from surveying to agriculture to public safety.
PIX4D
Prilly, CH
Description
PIX4Dmapper, the leading photogrammetry software that transforms your images into accurate and georeferenced digital models. Automatically convert images taken by drone, by hand, or by plane into highly precise 2D maps and 3D models. These outputs are customizable, timely, and complement a wide range of applications and software across industries.
PIX4Dmapper users have access to personal customer support and to a wealth of learning resources and training to help them become experts.
Industries:
- Surveying & mapping
- Mining
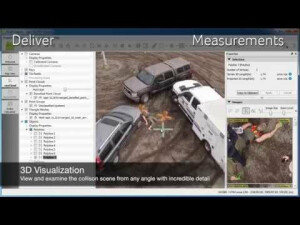
- Public safety
- Infrastructure
- Energy
Key Outputs: Survey-grade 3D point clouds, Digital Surface & Terrain Models, orthomosaics, contour lines, 3D textured models, index maps, and thermal maps.
Specifications
-
Required Computer System
-
System includes hardware
N
Operating system(s)
Windows 7, 8, 10 64 bits
CPU (min.)
Any CPU (Intel i5/ i7/ Xeon recommended)
CPU (preferred)
Intel i7/Xeon CPU quad-core or hexacore
Min. RAM memory [Mb]
4000
Preferred RAM memory [Mb]
16000
Min. data storage capacity [Gb]
10
Preferred data storage capacity [Gb]
100
Min. graphic card
Any GPU that is compatible with OpenGL 3.2
Supported special hardware
All cameras supported
User definable operations and extensions
Command line
64-bit version of software available
Y
Distributed processing capacity
N
GPU based calculations
Y
Hardware handling of big data sets
GeForce GPU with at least 2 GB RAM
-
Images and data
-
Source data
Any camera - Metric cameras, Multispectral cameras, Fisheye cameras, Camera rigs, DSLR cameras, Thermal cameras, 360° cameras, Smartphone cameras...
Input image formats
JPG / TIFF, RGB / NIR / Thermal / single or multi band / MP4 video
Export data formats
• Nadir Orthomosaic in GeoTIFF and kml google tiles • Nadir Digital Surface Models in GeoTIFF, XYZ, LAS and LAZ• Nadir Digital Terrain Models in GeoTIFF• Contour lines in SHP, PDF, and DXF • Orthomosaic from any facade in GeoTIFF• Digital Surface Model from any facade in GeoTIFF• Index (NDVI, NDRE, etc) maps in GeoTIFF• Classification maps in shapefile• 3D textured mesh in OBJ, PLY, DXF, FBX and PDF• 3D Point cloud in LAS, LAZ, XYZ and PLY • User-defined vector objects in DXF, SHP, DGN and KML • Fly-through animation videos in MP4 and AVI • Fly-through waypoints in CSV • Compatible formats of Aerial Triangulation results for traditional photogrammetry software solutions (e.g. INPHO, Leica LPS, DAT/EM Summit Evolution, and many more)
Scanned analogue Aerial Photos
Y
Digital Aerial Nadir Frames
Y
Oblique Images
Y
Linear array sensors
N
Optical Satellite Images
Y
UAS Images
Y
Radar Images
N
-
DEMs & Orthoimages
-
Automatic matching
Dense matching, 3D points computed up to every pixel of each original image.
Automatic breakline extraction
N
Checking facilities (DEM editing)
Y
Automatic contour generation
Y
Mosaicing of orthoimages
Y
True orthoimage generation
Y
Dense DSM creating capability
Y
DSM to DTM filtering
Y
Automatic seam line creation
N
Dense Image Matching
Y
-
Viewing System
-
Min. display memory [Mb]
16
Pref. display memory [Mb]
2000
Resolution
Any
Method of stereo image separation
rayCloud(tm) combining 3D point cloud with original input images for multi-ray matching.
-
General
-
Year of introduction
2014
Year of last update
2019
Modular
The software package includes both desktop and cloud processing, with different commercial options: Buy (one-time-charge license) or rent (monthly or yearly subscription plans). 2 devices.
License configuration
Yes
Regional settings available
Yes
-
Orientation and triangulation
-
Automatic interior
Y
Relative
Y
Automatic aerotriangulation
Y
Automated blunder detection
Y
Self calibration
Y
Automatic Relative
Y
images simultaneously processed
Y
-
Measurement tools
-
Length
Y
Area
Y
Volume
Y
-
Image manipulation & processing
-
Automatic contrast manipulations
N
Spatial convolution
Y
Radiometric corrections
Y
Radiometric adjustment for mosaicing
Y
-
More information
-
Main applications
Surveying, Mining, Inspection, Forensics, Public Safety, Emergency Response, Environmental Monitoring, Earthworks...
Distinguishable features
Automatic self-calibration || Machine-learning point cloud classification || Any camera || All imagery and video support (aerial, oblique and terrestrial || rayCloud™ combining 3D points with original input images || Mosaic Editor, Cloud-based processing and support || Rental options
Documents
Brochure
pix4dmapper-onepager-2020-en.pdf
4.37 MB


![Correlator3D_Photogrammetry_Software[1].png](https://cdn.geo-matching.com/voawvkmn.png?w=300&h=300&crop=1&s=5be635bfd45955e69d36230f0f05598f)


![ELCOVISION-10[1].jpg](https://cdn.geo-matching.com/wRWm7Gyp.jpg?w=300&h=300&crop=1&s=d9595e4eab382ce38f888d623cb550d7)






{kind=link}