
DPW PHOTOMOD
Digital Photogrammetric Workstation
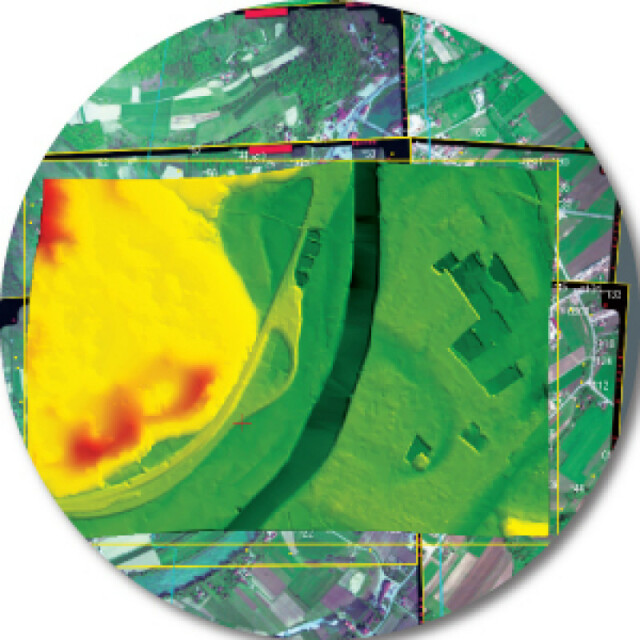
PHOTOMOD provides a closed production cycle, and involves the generation of many kinds of value-added products: digital maps, DEM, orthomosaics, 3D-vectors without the use of third party solutions. The PHOTOMOD software complex is used in all areas where metric information about the Earth with maximal precision is required.
Racurs
Moscow, RU
Description
This state-of-the-art software allows the extraction of geometrically accurate spatial information from almost all commercially available types of imagery, whether obtained by film or digital cameras, UAS, high resolution satellite scanners.
PHOTOMOD is a modular system. This allows users to obtain maximum benefit from its high level of flexibility. Each module performs specific operations during a certain stage of processing. Configure for optimal system production. Buy only the modules you need for your particular workflow. Easy operation. User interface of each module is optimized for module functions. Still, general interface elements remain uniform throughout the system.
Though highly integrated through the sharing of project data, each module has a unique place in the overall workflow, making it possible to construct consistent project processing sequences. The fundamental concept of PHOTOMOD is to enable projectwork through a series of well-defined steps (data preparation, block adjustment, processing) and provide the support of a flexible set of tools at every stage.
Specifications
-
Feature Extraction and Mapping
-
Mapping facilities
Y
Semi-automatic corner point extraction
Y
Semi-automatic line feature extraction
Y
Semi-automatic building extraction
Y
3D superimposition
Y
Integration with scanned maps
Y
Integration with 2D vector maps
Y
Integration with 3D vector maps
Y
Integration with point clouds
Y
Automatic texturing
N
-
Required Computer System
-
System includes hardware
N
Operating system(s)
Windows 7, 8, 10
CPU (min.)
Intel Core i7 (4 cores)
CPU (preferred)
Intel Core i7 (6 cores)
Min. RAM memory [Mb]
4000
Preferred RAM memory [Mb]
32000
Min. data storage capacity [Gb]
1000
Min. graphic card
NVIDIA Quadro K2000
Supported special hardware
3D mice; stereomonitors
User definable operations and extensions
not applicable
64-bit version of software available
Y
Distributed processing capacity
Y
GPU based calculations
Y
Cloud processing
Available at https://www.geocloud.work/
Preferred data storage capacity [Gb]
2000
Hardware handling of big data sets
CUDA for DSM
-
Images and data
-
Source data
Aerial, satellite, UAS images
Input image formats
TIFF; BMP; RSW; SIT; IMG; NITF; JPEG; GIF; PNG; PIX; JPEG2000; satellite scanner images; ADS 40/80; A3 SLF
Export data formats
many popular
Scanned analogue Aerial Photos
Y
Digital Aerial Nadir Frames
Y
Oblique Images
Y
Linear array sensors
Y
Optical Satellite Images
Y
UAS Images
Y
Radar Images
Y
Mission planning
N
-
DEMs & Orthoimages
-
Automatic matching
Y
Automatic breakline extraction
N
Checking facilities (DEM editing)
Y
Automatic contour generation
Y
Mosaicing of orthoimages
Y
True orthoimage generation
Y
Dense DSM creating capability
Y
DSM to DTM filtering
Y
Automatic seam line creation
Y
Dense Image Matching
Y
Georeferencing / method of georeferencing
By using: GPS/IMU data, GCPs, vector map, external orthophoto
Other presentation options
Colored, shaded
-
Viewing System
-
Min. display memory [Mb]
1024
Pref. display memory [Mb]
2048
Resolution
1280 × 1024 (min)
Method of stereo image separation
anaglyph; OpenGL Stereo
-
General
-
Year of introduction
1994
Year of last update
2022
Modular
Core; AT; SolverA; SolverS; DTM; dDSM, StereoDraw; Mosaic; GeoMosaic; GeoCalculator, StereoMeasure
License configuration
Lite and time limited versions
Regional settings available
English, Chinese, Greek, Russian, Spanish
-
Orientation and triangulation
-
Automatic interior
Y
Relative
Y
Automatic aerotriangulation
Y
Automated blunder detection
Y
Self calibration
Y
images simultaneously processed
Y
Automatic Relative
Y
Batch processing
Yes
Scripting language
No
-
Measurement tools
-
Length
Y
Area
Y
Volume
Y
lengte / area / volume
Y
Stereoscopic measurements
Y
Vegetation index calculation
Used internally for DTM/DSM filtering
Automatic classification
Water, low, medium and high vegetation, buildings, ground - used internally for DTM/DSM filtering
-
Image manipulation & processing
-
Automatic contrast manipulations
Y
Spatial convolution
Y
Resampling
Y
Radiometric corrections
Y
Radiometric adjustment for mosaicing
Y
-
More information
-
Main applications
Spatial aerial triangulation, Digital terrain models, 2D and 3D-vectorization, Orthorectification and mosaic creation, 3D-modeling, Map making
Distinguishable features
price; high productivity; modular configuration; no third party products needed; network configurations; quality control; ease of use



![ELCOVISION-10[1].jpg](https://cdn.geo-matching.com/wRWm7Gyp.jpg?w=300&h=300&crop=1&s=d9595e4eab382ce38f888d623cb550d7)








{kind=link}