
Cardinal Systems
Cardinal Systems LLC
Flagler Beach, US
Description
Specifications
-
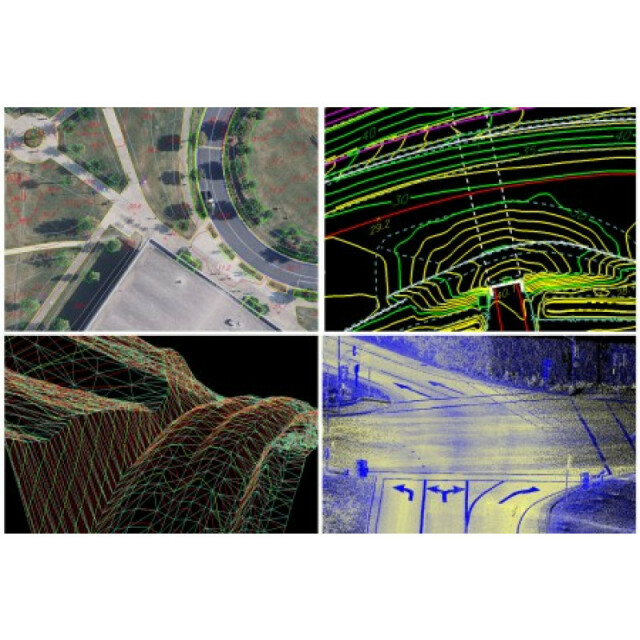
Feature Extraction and Mapping
-
Mapping facilities
Y
Semi-automatic corner point extraction
N
Semi-automatic line feature extraction
Y
Semi-automatic building extraction
N
3D superimposition
Y
-
Required Computer System
-
System includes hardware
N
Operating system(s)
Windows XP/7 32/64 bit
CPU (min.)
Core2Duo
CPU (preferred)
Multi Core (4,6)
Min. RAM memory [Mb]
16000
Preferred RAM memory [Mb]
32000
Min. data storage capacity [Gb]
1
Preferred data storage capacity [Gb]
4
Min. graphic card
2GB
Supported special hardware
NVIDIA 3D Vision Stereo display
User definable operations and extensions
Function Keys; Macros; Python language
64-bit version of software available
Y
Distributed processing capacity
N
Hardware handling of big data sets
4GB NVIDIA Quadro quad-buffered
-
Images and data
-
Source data
b/w; colour; frame; ADS40; scanned aerial; small and large format digital.
Input image formats
TIFF; JPEG; ECW; MrSid; ADS40
Export data formats
ASCII; DXF; Microstation; Shapefile; LAS; LiDAR Points, Survey Points, CAISE, DSFL
-
DEMs & Orthoimages
-
Automatic matching
Feature Based
Automatic breakline extraction
N
Checking facilities (DEM editing)
Y
Automatic contour generation
Y
Mosaicing of orthoimages
Y
True orthoimage generation
N
Dense DSM creating capability
Y
DSM to DTM filtering
Y
-
Viewing System
-
Min. display memory [Mb]
2000
Pref. display memory [Mb]
4000
Resolution
1680x1050
Method of stereo image separation
NVIDIA 3D Vision Stereo display with 4GB NVIDIA Quadro quad-buffered graphics card (i.e. NVIDIA Quadro K4200)
-
General
-
Year of introduction
2000
Year of last update
2014
Modular
VrOne; VrTwo; VrLiDAR; VrOrtho; VrAirTrig; VrMosaic; VrBalance; VrVolumes; VrLite; VrImageUtility; VrController
License configuration
Node or server licensing. Demo version available
-
Orientation and triangulation
-
Automatic interior
Y
Relative
Y
Automatic aerotriangulation
Y
Automated blunder detection
Y
Self calibration
Y
-
Measurement tools
-
Length
Y
Area
Y
Volume
Y
-
Image manipulation & processing
-
Automatic contrast manipulations
Y
Spatial convolution
N
Resampling
nearest neighbour; bilinear; bicubic
Radiometric corrections
N
Radiometric adjustment for mosaicing
Y
-
More information
-
Main applications
VrOne; VrTwo; VrLiDAR; VrOrtho; VrAirTrig
Distinguishable features
pragmatic; over 200 mapping applications; optional stereo Lidar vector collection stereo system; developed by mapping professionals for over 25 years.
![ELCOVISION-10[1].jpg](https://cdn.geo-matching.com/wRWm7Gyp.jpg?w=300&h=300&crop=1&s=d9595e4eab382ce38f888d623cb550d7)





{kind=link}