
Dynautics Ship Sim 3
Design and Simulation tool to help design Uncrewed Surface Vehicles
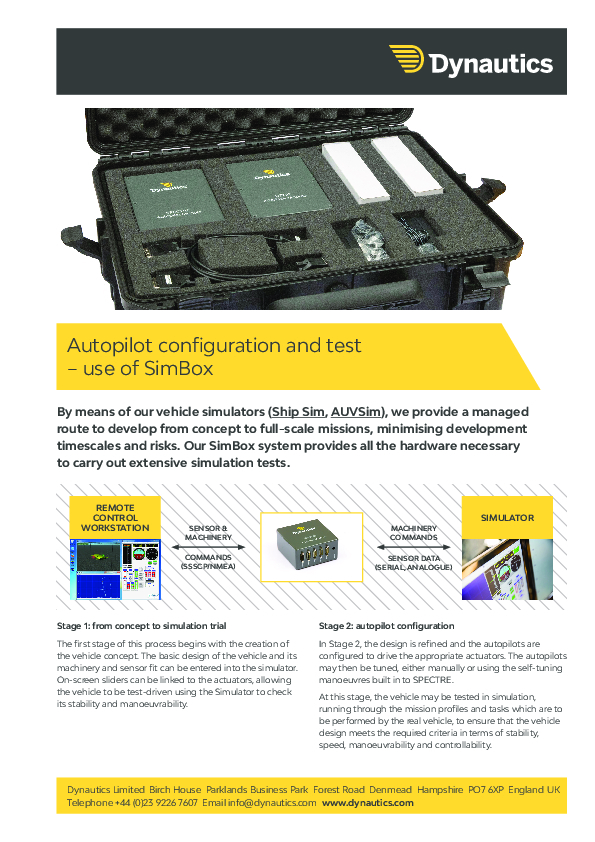
Designing an Autonomous surface vehicle is complex. Numerous design decisions need to be made and this simulation package is the perfect tool to help designers speed the design process, reduce waste, save time and money by allowing the designer to test the design in a simulated environment. The design can be iterated and refined prior to finalising the design.
Dynautics Ltd
Denmead,, GB
Description
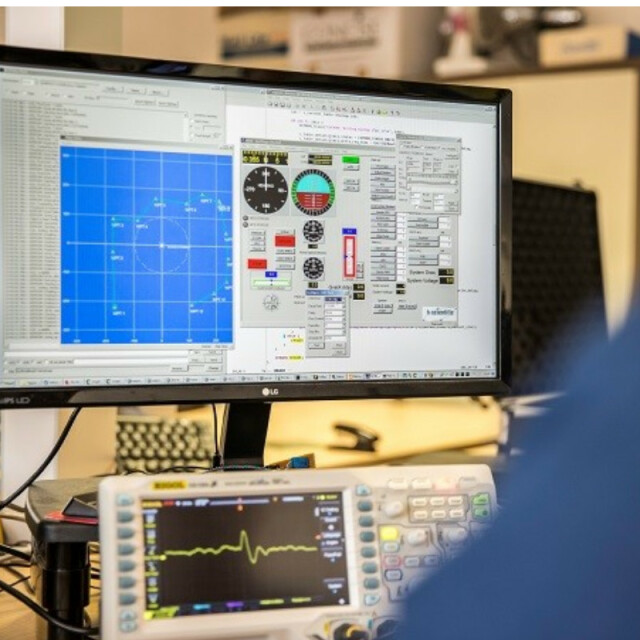
The Dynautics Ship Sim 3 is a surface vessel simulator that can be configured using the ISO16329, IEC 62065 or proprietary model to model the behaviour of a large range of ships. Mathematical models include a detailed model which calculates aero and hydrodynamic forces, the force components generated by the propeller blades as they sweep around, wave forces, and the lift effects, which are responsible for planning behaviour.
Sensors are individually modelled, including error budgets, positional offsets, magnetic dip and variation. The sensor outputs are transmitted through serial and Ethernet ports using the appropriate data formats for an extensive range of devices.
The simulated vehicles, whether surface or subsurface, can be controlled using serial or analogue signals so that the vehicle and its environment can be fully tested with hardware in the loop.
Ship Sim 3 features include:
- Real-time, high-accuracy modelling of vessels in configurable sea currents, wind speeds, and wave heights;
- Fully configurable vehicles and propulsor configurations;
- Customisable user interface;
- A list of sensors which can be enabled and error characteristics that are configurable to mimic what is expected on the real vehicle
- Serial and Ethernet interfaces, fully configurable to transmit data using the appropriate sentence formats – many dozens of sentences supported
- Built-in data logging to Matlab MAT format and CSV
- Event logging
- Built-in autopilots for heading, speed, track, attitude, depth and height over the seabed
- Plan view supporting charts, GeoTIFF, and the ability to view from horizontal directions
- A fully configurable front end, allowing the user to add dials, digital readouts, LEDs, sliders and buttons to support a wide range of features
- External control inputs so that the simulator can accept commands from a third-party autopilot or SPECTRE in a variety of formats
- Joystick, helm and throttle controls can be interfaced;
- Multiple target vessels can be included in a simulation;
- Support for AIS, RADAR, and NMEA 2000;
- Optional external 3D view.
Specifications
-
General
-
Length [m]
1
Documents
Brochure
datasheet-autopilot-configuration-and-test.pdf
1.17 MB
Videos














{kind=link}