

Phantom AUV
Phantom AUV - Phantom Auv - Modular and Modifiable to Customer Needs
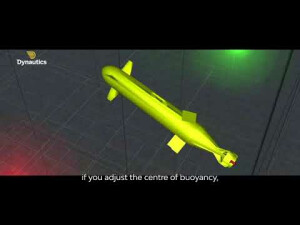
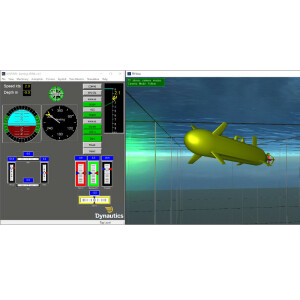
Our expertise in providing Autonomous Underwater Vehicles, including our in house designed Phantom modular AUV and our AUV control systems for the control and communication of sub-surface vehicles, allows us to expand the capabilities of your vehicle. Through the simulation process (Dynautics product AUV Sim) we can advance the development process and increase the vehicle’s efficiency. Positioning can be achieved through ultrasound communication and/or dead reckoning.
Dynautics Ltd
Denmead,, GB
Description
Phantom AUV and AUV Control System
Our expertise in providing Autonomous Underwater Vehicles, including our in-house designed Phantom modular AUV shown in the image above and AUV control systems for the control and communication of sub-surface vehicles, allows us to expand the capabilities of your vehicle. Through the simulation process (Dynautics product AUV Sim) we can advance the development process and increase the vehicle’s efficiency. Positioning can be achieved through ultrasound communication and/or dead reckoning.
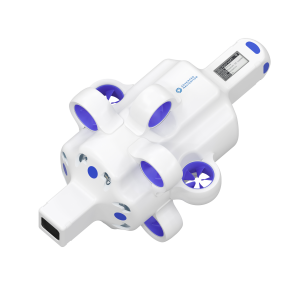
Our experience in delivering Dynamic Positioning (DP) solutions allows us to provide you with pin-point station keeping, enabling you to focus on your mission.
AUV/ROV Autopilot
The AUV / ROV autopilot is based on the SPECTRE autopilot board and has been installed on submersible vehicles. The system is equally suited taking over any level of control in:
- Manned submersibles, for example, a swimmer delivery vessel (SDV) and mini-submarine
- Semi-submersible autonomous vehicles with/without physical data link to operator workstation
- Remote Operated Vehicles (ROVs) with a physical data link to the operator workstation
- AUVs / UUVs in contact with a support ship
- Unmanned Underwater Vehicles (UUVs) in contact with a support ship
- Completely autonomous AUV / UUV operating ‘fire and forget’ missions. AUV/ROV/UUV autopilot offers heading, speed, track, attitude and depth/height control as well as Dynamic Positioning.
Specifications
-
Operations
-
Launch and Recovery System
Hand launch
Max. speed [kn]
3
Min. crew size
1
Min. required number of surface computers
0
Required size of storage room
Minimal - fits a car loading space
Articulated Viewing head
As required
Integral Sensors
As required
-
General
-
Propulsion or glider
Propulsion
Length [m]
1.2
Width [m]
0
Height [m]
0
Min. weight of AUV in air [kg]
12
Max. Weight of AUV in air [kg]
12
Portable
Y
Crane required
N
Maximum payload [kg]
5
Maximum depth rating [m]
30
Number of thrusters
1
Thruster specifications
Designed to customer requirement
Hovering capabilities
Optional
Diameter [mm]
160
Housing Material
Aluminium and Plastic
-
Telemetry and Control
-
Acoustic telemetry
Y
-
Navigation and Payload
-
Navigation sensors - standard
Optional Sonardyne Nano
Navigation sensors - optional
As required
Payload sensors - standard
As required
Payload sensors - optional
As required
-
Battery
-
Endurance at nominal power [hr]
3
Battery swap
Rechargeable
Recharge time from empty [hr]
3
-
More information
-
Applications
To suit customer requirements
Distinguishable features
Modular and available to customer order
Documents
Brochure
phantom-uav-datasheet.pdf
539.67 KB














{kind=link}