
UASMaster
Photogrammetry-Grade Processing for Unmanned Aerial Systems (UAS) and Terrestrial Close-Range Imagery
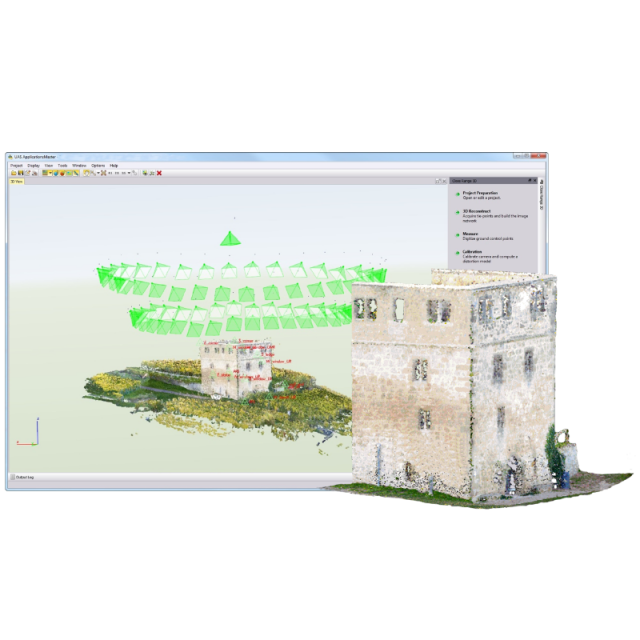
Generate imaging point clouds as a cost-effective alternative to laser scans, benefit from detailed images to acquire GIS data and transfer most of your survey work to the convenience of your office. Trimble UASMaster combines ease of use with the full power of a photogrammetric workstation.

Trimble, Inc.
Westminster, US
Description
Generate imaging point clouds as a cost-effective alternative to laser scans, benefit from detailed images to acquire GIS data and transfer most of your survey work to the convenience of your office. Trimble UASMaster combines ease of use with the full power of a photogrammetric workstation.
The software bridges the gap between simple near black-box workflows for non-photogrammetrists and photogrammetry expert workflows. UASMaster includes advanced technology to provide high quality results.
It easily integrates into the Inpho world of photogrammetry, into Trimble Business Center as well as into many 3rd party workflows. With its open market concept, UASMaster is able to process data from almost every hardware vendor for UAS. It works with acquired data from fixed-wing vehicles as well as with multi-copters and even hand-held cameras.
For 3D reconstruction projects, depending on project requirements, the only mandatory data is imagery - no need to know camera parameters, approximate image georeferences or ground control.
Key Features
- A complete photogrammetric workflow (geo-referencing, dense point clouds, orthomosaics and digitized vectors) combined in one single product.
- Quick black-box or multi-step processing with quality-optimized or performance optimized parameter presets including full featured refinement and editing tools.
- Process data from any type of UAS and frame cameras - with or without additional data.
- Excellent results without requiring specialized photogrammetry knowledge or experience.
- Also available integrated into Trimble Business Center Photogrammetry Module including all survey tools combined with survey hardware and GNSS base-line processing.
Do you have questions about this product?
- Questions about price, availability, and/or retailers
- Questions about technical specifications and usage
- Questions about suitability for your project or application
Specifications
-
Feature Extraction and Mapping
-
Mapping facilities
Y
Semi-automatic corner point extraction
N
Semi-automatic line feature extraction
N
Semi-automatic building extraction
N
3D superimposition
Y
-
Required Computer System
-
System includes hardware
N
Operating system(s)
Windows 7 (64 bit), Windows 10 (64 bit)
CPU (min.)
Quadcore
CPU (preferred)
8 core or more (16 core support per license)
Min. RAM memory [Mb]
8000
Preferred RAM memory [Mb]
16000
Min. graphic card
Nvidia Quadro
Supported special hardware
not applicable
User definable operations and extensions
not applicable
64-bit version of software available
Y
Distributed processing capacity
N
GPU based calculations
N
Hardware handling of big data sets
Nvidia Quadro 4000
-
Images and data
-
Source data
Areal frame up to 100 Megapixels (Limited to block size of 300 GPixel), Open for any UAS hardware, multi-copter, fixed-wing or hand-held frame camera or fixed wing.
Input image formats
TIFF, JPEG
Export data formats
TIFF, JPEG, others
Digital Aerial Nadir Frames
Y
Oblique Images
Y
Optical Satellite Images
N
UAS Images
Y
Radar Images
N
-
DEMs & Orthoimages
-
Automatic matching
point cloud matching using feature-based, area-based and cost-based (dense matching), DTM and DSM
Automatic breakline extraction
Y
Checking facilities (DEM editing)
Y
Automatic contour generation
Y
Mosaicing of orthoimages
Y
True orthoimage generation
Y
Dense DSM creating capability
Y
DSM to DTM filtering
Y
Automatic seam line creation
Y
-
Viewing System
-
Resolution
not applicable
Method of stereo image separation
any major method supporting OpenGL quad buffered stereo
-
General
-
Year of introduction
2013
Year of last update
2018
Modular
No, All-In-One solution for UAS acquired imagery from georeferencing incl. camera calibration to point cloud matching and orthomosaicking including editing capability
License configuration
perpetual, demo
Regional settings available
chinese, german, russian
-
Orientation and triangulation
-
Automatic interior
Y
Relative
Y
Automatic aerotriangulation
Y
Automated blunder detection
Y
Self calibration
Y
-
Measurement tools
-
Length
Y
Area
N
Volume
N
-
Image manipulation & processing
-
Automatic contrast manipulations
Y
Spatial convolution
Y
Radiometric corrections
Y
Radiometric adjustment for mosaicing
Y
-
More information
-
Main applications
mapping; point cloud generation; orthophoto production typically for the following industries:forestry, agriculture, mining, utility and energy , urban development, defense, archaeology, environmental monitoring and disaster response
Distinguishable features
UAS processing solution with focus on photogrammetric tools and workflows, highly productive; high degree of automation; complete system; highly reliable accuracy; thorough quality analysis; open market concept (supporting any type or vendor of UAS platforms)
Documents
Brochure
techsheet-inpho-uasmaster-english-a4-screen.pdf
213.77 KB







{kind=link}