









ARV-i
Remote Resident Underwater Drone
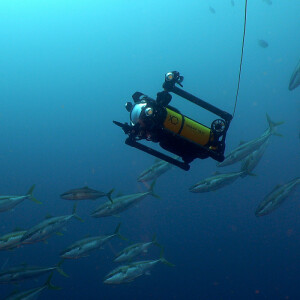
ARV-i, designed by Boxfish Research and powered by Transmark SubSea, is an innovative autonomous underwater resident vehicle for continuous monitoring of underwater assets. It excels at automated and remote inspection of offshore energy installations, offshore oil and gas platforms, offshore wind farms and offshore aquaculture plants.

Boxfish Robotics
Auckland, NZ
Description
ARV-i is an entirely new class of autonomous vehicle, providing its customers with a range of operational configurations. As a resident vehicle, ARV-i will spend its time entirely underwater, for up to 12 months per deployment. The vehicle is designed to be autonomous, using prior programming and onboard intelligence to locate and observe underwater assets. When its battery is low, ARV-i will return to its proprietary docking station for wireless battery charging and transfer of data collected from the completed excursion.
A manual piloting mode is also available for ARV-i when human eyes are required for a closer look at certain assets. ARV-i can be remotely controlled from a paired control station anywhere in the world using wireless or fixed IP connections through 4G/Internet tether extension adapters.
The vehicle is designed to operate without a tether connection to the surface, but tethered options are available for customers who require superior video quality – a tethered solution is the best option to access the uncompressed 4K video stream or transmit data from ARV-I at higher rates.
At the 12-month service interval, the vehicle is exchanged with a replacement while the original is refurbished.
Applications for ARV-i abound in offshore industries that require underwater observation and inspection, including energy, oil and gas, wind farms and aquaculture.
Do you have questions about this product?
- Questions about price, availability, and/or retailers
- Questions about technical specifications and usage
- Questions about suitability for your project or application
Specifications
-
Operations
-
Launch and Recovery System
hand launch, ship launch or operation from dock
Min. crew size
2
Min. required number of surface computers
1
Min. turning radius [m]
0
Max. speed [kn]
2.5
Integral Sensors
Attitude, Heading, Depth
-
General
-
Propulsion or glider
Length [m]
0.61
Width [m]
0.4
Height [m]
0.36
Min. weight of AUV in air [kg]
24
Portable
Y
Crane required
N
Maximum depth rating [m]
1000
Number of thrusters
8
Thruster specifications
3D vectored thrusters
Max. Weight of AUV in air [kg]
30
Hovering capabilities
Intrinsic
-
Telemetry and Control
-
Emergency recovery procedure
Real-time manual control override, autonomous return to dock
-
Topside Equipment
-
Weight
8
-
Communication
-
Communication Sensor 1
4G modem
Communication Sensor 2
remote control over Internet
-
Navigation and Payload
-
Navigation sensors - standard
Optical Modem (Free Space Optical), USBL (1000m range), WiSub pinless connector, 150W and 100 Mbit/s
Navigation sensors - optional
Tethered option available
Payload sensors - optional
Imaging Sonar, Profiling Sonar, Photogrammetry Camera
-
Battery
-
Endurance at nominal power [hr]
3-10
Recharge time from empty [hr]
4
Battery swap
Y
-
More information
-
Applications
underwater observation and inspection, including energy, oil and gas, wind farms, ports, canals and aquaculture
Distinguishable features
• Autonomous return to home, path following •Permanent subsea residency with remote, shore-based control • Tetherless manual and autonomous operation • Asset and infrastructure following and avoidance • Autonomous docking • Reliability through redundant systems • Hot-swappable payload.

{kind=link}