

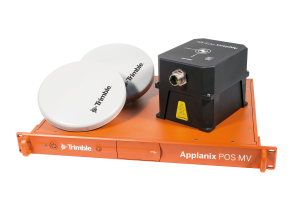
Applanix POS MV OceanMaster
Anywhere on water, trust your position
POS MV OceanMaster is a userfriendly, turnkey system designed and built to provide an accurate attitude, heading, heave, position, and velocity data of your marine vessel and onboard sensors.

Trimble Applanix
Richmond Hill, CA
Description
POS MV blends GNSS data with angular rate and acceleration data from an IMU and heading from the GPS Azimuth Measurement System (GAMS) to produce a robust and accurate full six degrees-of-freedom position and orientation solution.
Do you have questions about this product?
- Questions about price, availability, and/or retailers
- Questions about technical specifications and usage
- Questions about suitability for your project or application
Specifications
-
Other specifications
-
Graphical user interface
Y
Typical application
Georeferencing and motion compensation of vessel mounted remote sensing equipment (multibeam; swath sonar; laser)
Distinguishable features
Robust and accurate georeferncing and motion compensation in all dynamics and at all latitudes
-
Environmental
-
Non-operating shock tolerance [g]
320
Operating shock tolerance [g]
90
Min. operating temperature [°C]
0
Max. operating temperature [°C]
55
-
Software
-
Name
POSPac MMS
Filtering
Y
Adaptable filter strength
Y
Adaptable input signals
Y
Integrity monitoring of position input
Y
Max. number of position input signals
5
Uncertainty indicators given in output
standard deviation of all position and orientation parameters
Uncertainty of time stamp for output [ms]
0.001
-
GNSS aided uncertainty
-
Heading [deg]
0.01
Pitch [deg]
0.01
Roll [deg]
0.01
Heave: constant part [m]
0.05
Heave: variable part [%]
5
-
General
-
Year of initial development
1994
Height [m]
0.089
Width [m]
0.442
Length [m]
0.356
Weight [kg]
5
Min. Voltage (AC)
110
Max. Voltage (AC)
230
Min. Voltage (DC)
24
Max. Voltage (DC)
24
Power consumption [W]
80
Splashproof casting
Y
Water resistant casting
Y
Removable from base plate
Y
Type of application
Marine
-
Unaided uncertainty
-
Pitch [deg]
0.02
Roll [deg]
0.02
Heave [m]
0.05
Decrease in position accuracy [m/hr]
60
-
Data formats
-
NMEA formats
GGA; GST; HDT; ZDA; GGK; VTG; PASHR; PRDID; UTC; RMC; GSA; GSV
RTCM
Y
Other
CMR / CMR +; Ethernet (UDP / TCP)
-
Inertial Measurement Unit
-
Calibration procedure
Self calibrating
Documents
Brochure
POS-MV-OceanMaster.pdf

Other documents
-
An Analysis of Vertical Position Error Estimation in TPE and CUBE for Hydrographic Surveying1.73 MB
-
Marine Surveying with Fugro Pelagos153.72 KB
-
Tightly Integrated Inertially-Aided Post Processed Virtual (2)1.9 MB
Videos









{kind=link}