

















Codevintec CK-14
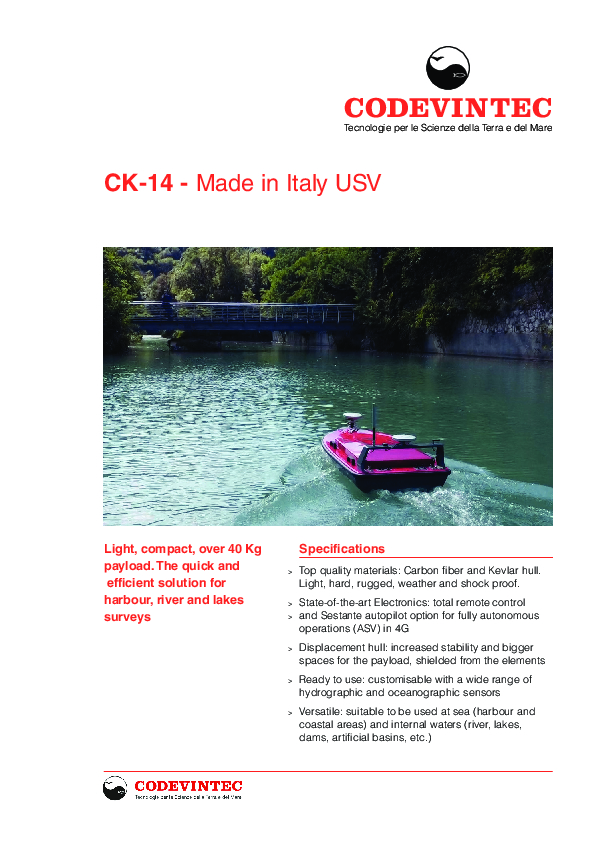
CK-14: where USV versatility meets limitless possibilities in inland waters and coastal havens.
CK-14 is an ASV CE marked designed and manufactured entirely in Italy. It is made of carbon fiber and Kevlar that give it maximum lightness and strength for all kinds of use. It is extremely small and this allows to use the CK-14 also in shallow water contexts. It can be equipped with different types of instruments for bathymetric surveys with singlebeam and multibeam, morphological type surveys with Side Scan Sonar, current meter surveys with ADCP and more.

Codevintec
Milano, IT
Description
Materials
Carbon fiber and Kevlar were the go-to-materials to guarantee lightness, resistance and durability and offer an extraordinary resistance to the elements, seasalt and UV, with the great advantage of being easily fixable.
All the drone is finished with GELCOAT, providing even more protection, further resistance to UV rays, increase waterproof qualities and maintaining its appearance and beauty for a long time.
Type
Carbon fiber and Kevlar were the go-to-materials to guarantee lightness, resistance and durability and offer an extraordinary resistance to the elements, seasalt and UV, with the great advantage of being easily fixable.
All the drone is finished with GELCOAT, providing even more protection, further resistance to UV rays, increase waterproof qualities and maintaining its appearance and beauty for a long time.
Propulsion
Two brushless propellers, low maintenance, can work independently and counteracting each other, so to give the best manoeuvrability to the CK-14: no rudder, no other components nor leverage that can break. The blades are protected directly by the design of the hull itself.
Interior
The wide removable cover, free from any obstruction above it, allows full and easy access to the interior of the hull for easy operations and maintenance of batteries and equipment. Internally the wide Moon-Pool (33x27 cm) can host a wide variety of instruments and most of the multibeams with MillCross transducers, even the big ones, without negatively impacting on the resistance or on the stiffness. The availability of customized supports allows to integrate third parties sensors like SBES, MBES, ADCP, SSS, Lidar, multiparameters probes, winches, etc.
Transportation
Two load-bearing handles on each side of the vehicle, a load-bearing eyebolt on the bow for lifting and towing, a load-bearing roll-bar on the stern of the CK-14 allow the USV to be moved easily and with little effort. The roll-bar is designed also to host antennas, instruments and accessories, even from the enduser, without having to modify the hull, hence maintaining its sturdiness. Two independent contrarotating low-maintenance brushless thrusters provide the maneuverability, avoiding the use of delicate rudders or levers that can break and must be maintained, and are protected directly by the hull itself, allowing for trouble-free missions and transport.
Power
The electrical system of the CK-14 offers two completely separate and independent lines for the drone and for the payload, all with redundant protection circuits and thermal magnetic switches. The payload is also separated into two power lines for greater versatility: 12 and 24 Volt. CK-14 uses high-end professional batteries, however easily available on the market: 16.000mA Lithium polymer with low self-discharge. The autonomy offered is about 12 hours, which varies depending on the payload and use. Numerous housings in the compartment allow you to distribute weights and dimensions depending on the payload used, thus balancing the stability during navigation.
Control
The management of the entire drone and its payload is entrusted to a powerful industrial PC with Intel processor and Windows OS. It deals with the management and control of navigation, communication lines and all the on-board instrumentation. Its power allows to accommodate the most popular hydrographic software, including Teledyne PDS, Hypack and Qinsy, even in their most advanced versions.
The control of the CK-14 can take place with a normal professional 6-channel remote control, 2.4GHz band with 30 programmable presets and integrated display or via PC, Tablet or Smartphone when equipped with the Sestante module.
Autopilot - Sestante
Sestante is the optional autopilot module entirely designed by Codevintec that allows to transform the CK-14 from a USV (Unmanned Surface Vessel) to a ASV (Autonomous Surface vessel). Sestante allows full control and management of the onboard PC and the navigation in different mode: totally autonomous or manual with radiocontroller, long range Wi-Fi, unlimited 4G, all selectable in real-time. Sestante is made of an onboard unit, a compact Ground Control Station with 16 hours battery life, a 7” touchscreen console with 10 hours battery life and a software to plan the survey. The control and management of both navigation and onboard instrumentation are allowed to multiple users simultaneously, as an example: while the pilot controls the route with the console, the operator can manage the acquisition with a normal PC, and the client representative can follow the survey from a third station, at the same time the end client can follow the survey from the other side of the world.
Do you have questions about this product?
- Questions about price, availability, and/or retailers
- Questions about technical specifications and usage
- Questions about suitability for your project or application
Specifications
-
More information
-
Applications
Hydrographic and Oceanographic surveys. Dredge monitoring. Construction and Inspection zones. Inland waters (river, lakes, dams, reservoirs, etc.) and coastal waters
Commercial Options
USV and ASV versions available.
Distinguishable features
CE compliance. Lightweight and highly resistant Carbon-Kevlar fiber vessel with Gelcoat finishing. Displacement hull offers ample space and instrument protection Protected propellers also provide maneuverability (no rudders, no add-ons, no levers that can be damaged) Large Moon Pool with easily accessible storage room and interchangeable payload possibilities. Roll bar for carrying and additional aerial instrument installation. Various customizations and configurations, even at a later stage, even with the customer provided instruments.
-
General
-
Chassis
Carbon-Kevlar Fiber with Gelcoat finishing. Roll-bar for antennas and optional aerial instruments (es. Lidar and cameras)
Draft [m]
0
Height [m]
0
Length [m]
1
Max. Weight of USV in air [kg]
70
Min. weight of USV in air [kg]
14
Number of thrusters
Two counterrotating thrusters, protected by hull shape
Portable
Y
Thruster specifications
Tri-phase brushless motors, fully-flooded and low maintenance with 6,7 kg propulsion each
Width [m]
0
-
Communication and Control
-
Auto- control
Yes
Control parameters sent to the USV
Waypoint plan - Survey
Data sent to shore
Varies
Emergency recovery procedure
Return To Launch, Smart Return to Launch, Hold Position
Max. Baud rate [Mb/s]
500
Type of Communication
RC, Wi-Fi or LTE
-
Navigation and Payload
-
Navigation sensors - optional
100% customizable
Navigation sensors - standard
GNSS receiver, electronic compass
Payload sensors - standard
PC Intel with Windows OS
Payload sensors - optional
Singlebeam – Multibeam – SSS – ADCP – Lidar – SBP – Profiling Winch for SVP, CTD and Multiparameter Probes – Third party sensors integration available upon request. 100% customizable
-
Operations
-
Available size of storage room
Wide storage room thanks to the displacement type hull. Moon Pool 33x27cm with interchangeable payload possibilities.
Launch and Recovery System
Not needed. Vessel equipped with 4 handles, ringbolt at bow and roll-bar at stern
Max. Remote Operating Range {m}
99999999999999
Max. speed [kn]
6
Max. WMO seastate
3
Min. crew size
1
Min. turning radius [m]
0
Min. required number of surface computers
0
Operational Area
Coastal areas, harbours and inland waters (river, lakes, dams, artificial basins, etc.)
Other requirements
100% customizable
-
Energy and Propulsion
-
Energy Source
12-24V LiPo batteries
Endurance at nominal power [hr]
10-14 (payload and number of battery packs dependent)
Propulsion
2 electric brushless propellers
Propulsion Power
1.9kW
Documents
Brochure
CV 2203 CK-14 technical sheet en.pdf
2.19 MB
Articles

{kind=link}