







OxTS Georeferencer - Lidar Georeferencing and Boresight Calibration Software
Georeference LiDAR Data Using the Navigation Data From Your INS!
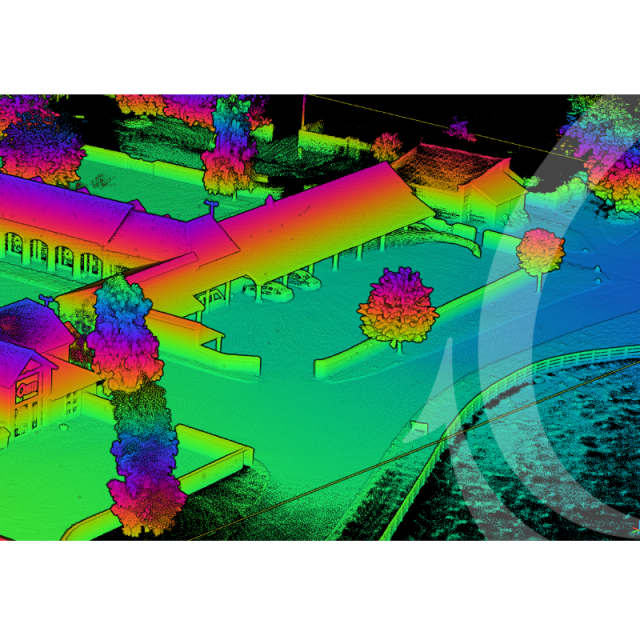
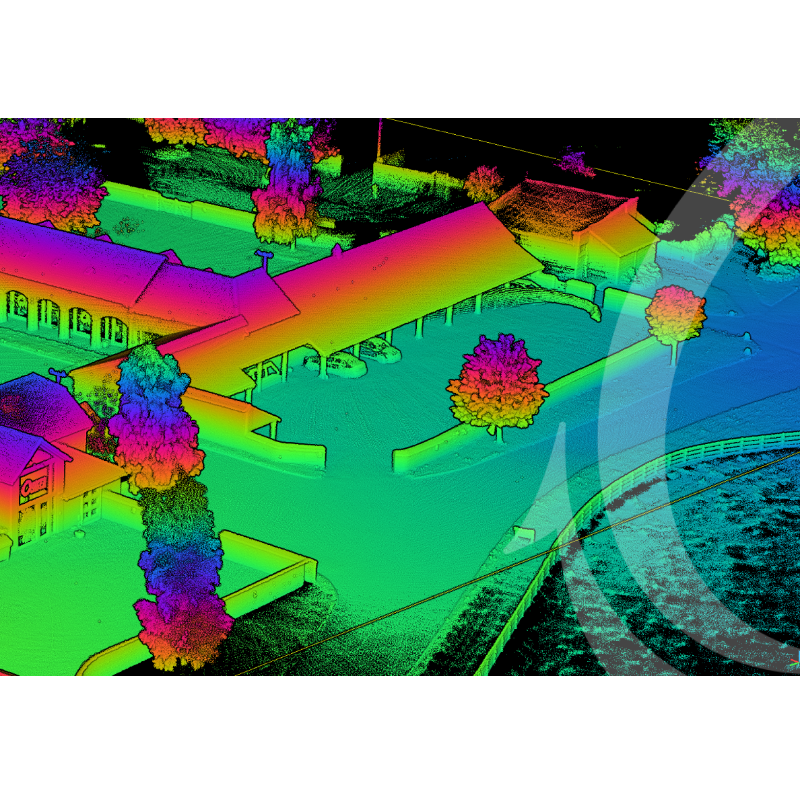
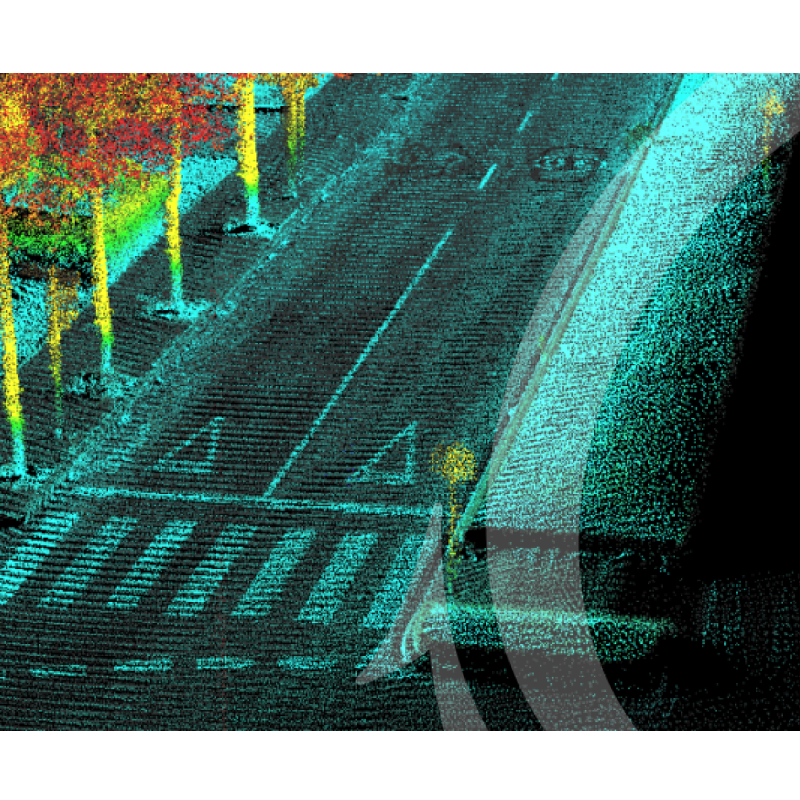
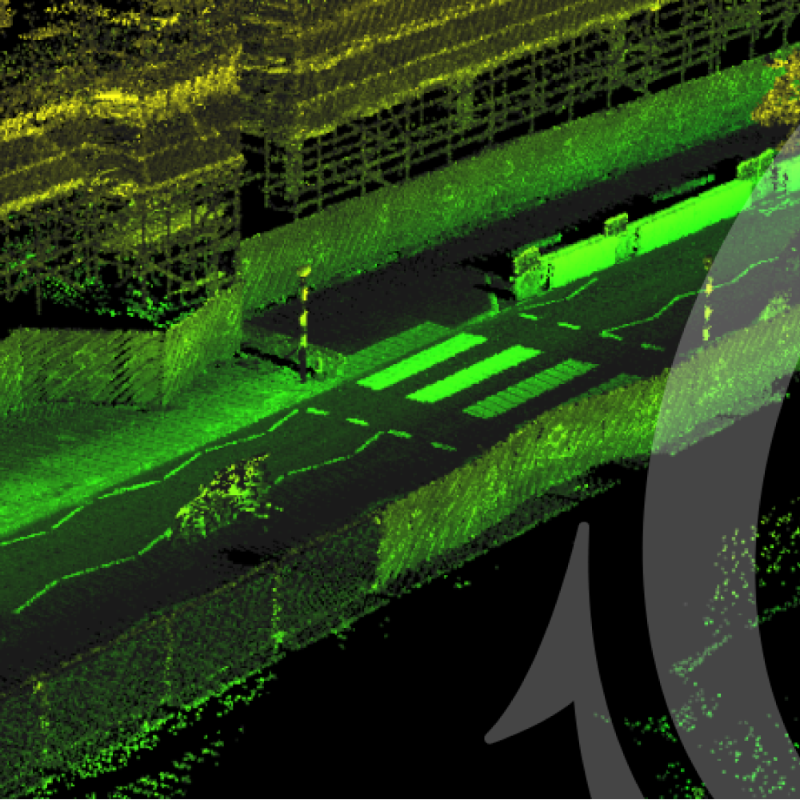
OxTS Georeferencer is a simple and powerful Lidar georeferencing software that combines INS data with the raw data from a wide range of Lidar scanners to output highly accurate 3D point clouds. OxTS Georeferencer supports integrations with sensors from Velodyne, Hesai, Livox and Ouster with other new families of Lidar being added regularly.

Oxford Technical Solutions - OxTS
Bicester, GB
Description
NEW: anyNAV
Originally developed for use with OxTS navigation data only, OxTS Georeferencer is now available to use alongside any INS, thanks to the new anyNAV feature.
OxTS Georeferencer will now also take the navigation data from a third party INS (position, heading, pitch/roll etc.) and allow users to quickly and easily georeference raw LiDAR data from multiple sensor families. The resulting data can then be viewed in many pointcloud viewer software packages.
FREE TRIAL - Register for your free 14 day trial here and use OxTS Georeferencer to boresight your payload, and georeference your LiDAR data using your existing navigation device - Learn more and register for my 14-day trial
OxTS Georeferencer
OxTS Georeferencer is a software tool developed by OxTS to combine INS trajectory data - from a wide range of OxTS and 3rd party INS devices - with raw Lidar data to create a georeferenced 3D point cloud. OxTS Georeferencer takes a file collected with a Lidar scanner (synchronised in real-time with an inertial navigation system), a processed navigation trajectory file from the INS, and some required configuration files, to create a LAS point cloud files that can be viewed in many 3rd party point cloud viewer packages. Thanks to our experience in calibration techniques, we have been able to develop a solution that helps system integrators and end-users to start their work with confidence that their INS and Lidar hardware has been installed precisely and accurately.
Georeferencing
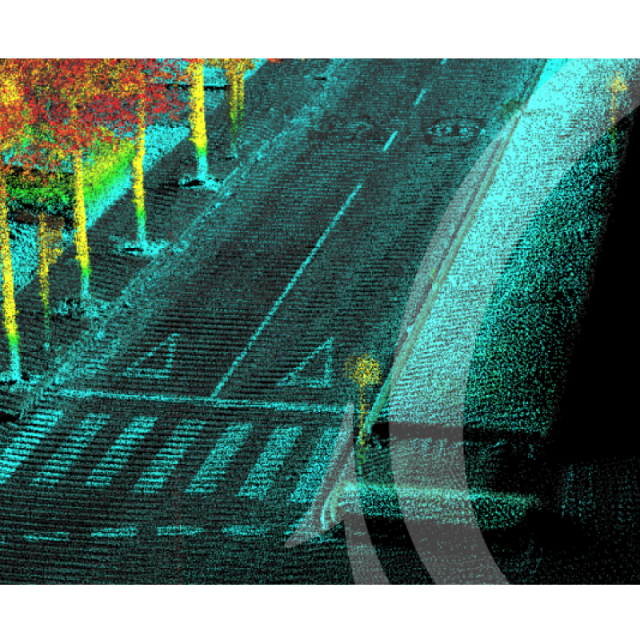
OxTS Georeferencer’s main function is to synchronise and fuse the INS and LiDAR data sets. A Lidar sensor can sense the range of a target, but it has no internal knowledge of when or where it is, or where it has moved to since the last scan occurred. This is where the INS adds essential information:
- Nanosecond accurate time (Survey grade GNSS receivers)
- RTK/PPK accurate position (Survey grade GNSS receivers and tightly-coupled navigation engine)
- Accurate heading, pitch, and roll (Survey grade IMU sensors)
Thanks to living accuracies being reported as well, the data can be intelligently filtered based on the estimated position/orientation accuracy of the INS, allowing you to perform less clean-up of the data in post-processing.
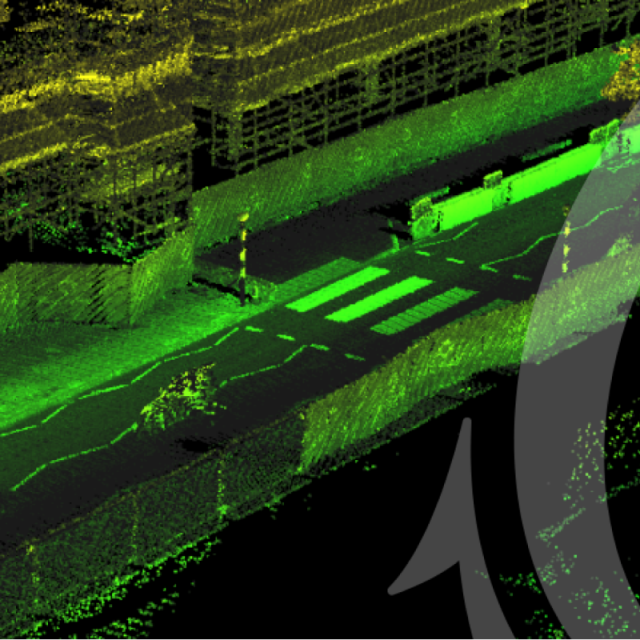
Boresight Calibration
Boresight calibration is an essential part of INS & Lidar integration. If the coordinate systems of the two devices do not match perfectly then the georeferencing of Lidar data will diverge over longer ranges and result in a less accurate point cloud. OxTS Georeferencer includes the ability to boresight supported Lidar devices in order to ensure the user can produce clean and reliable data every time. The results of running a boresight calibration are sometimes very clear, and sometimes marginal, but the objective is the same – align all sensors on the vehicle to the same coordinate system to ensure a high level of accuracy, regardless of a predefined test scenario. A foresighted system allows for complete flexibility over the way you perform a survey.
Further reading:
OxTS LiDAR Surveying Brochure
Download the OxTS LiDAR Surveying brochure and learn more about LiDAR Surveying using an OxTS INS. The brochure introduces the benefits of integrating the inertial data provided by an OxTS INS with raw LiDAR data. The brochure also details the currently supported LiDAR sensors. Read the brochure
OxTS Boresight Calibration Brochure
Accurately measuring the angles between your navigation and survey devices can be difficult to get right. However, using a data-driven approach to calibrating these angles can dramatically reduce survey set-up time, increase survey repeatability and improve the final output. Read how this can be achieved with our Boresight Calibration brochure. Read the brochure
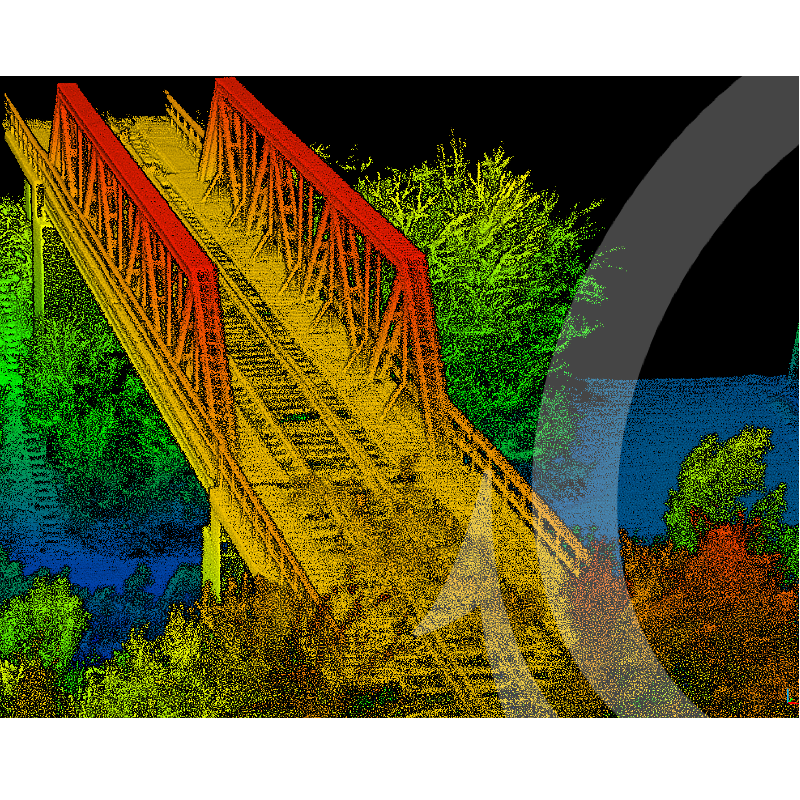
Case Study: Dronezone srl.
OxTS Partner Dronezone were tasked with scanning an ageing railway bridge to identify potential weaknesses in its structure. Once they made the decision to survey the bridge using a UAV, there were a number of challenges they faced, specifically around payload weight, flight time, data processing, point cloud accuracy and more. This case study details how they overcame them. Read the case study
Do you have questions about this product?
- Questions about price, availability, and/or retailers
- Questions about technical specifications and usage
- Questions about suitability for your project or application
Specifications
-
Files and Registering
-
Geo-referencing
Y
Input formats
PCAP, NCOM
Output formats
LAS, LAZ, PCD
-
General
-
Source of Point Clouds
Airborne Lidar, Outdoor TLS
Year of initial introduction
2020
Year of last update
2022
Supported Systems
Velodyne - VLP-16 PUCK, VLP-16 PUCK-LITE, VLP-32C, HDL-32 Alpha Prime VLS128 / Hesai - Pandar40, Pandar40P, Pandar 40M, Pandar64, PandarQT, Pandar128, PandarXT-16, PandarXT-32 / Ouster - All Gen2 (32, 64 & 128 versions of OS0, OS1 & OS2 sensors) / Livox - Mid-40, Mid-70 and the Livox Avia / Robosense
Documents
Brochure
OxTS-2023-Georeferencer Techsheet-compressed.pdf
555.37 KB
Other documents
-
OxTS Boresight Calibration Brochure1.79 MB
-
OxTS LiDAR Surveying Brochure1.33 MB
Videos




{kind=link}