















xNAV650 GNSS/INS
Small, Lightweight and Affordable Ins Ideal for Applications Where Payload Size and Weight Matter
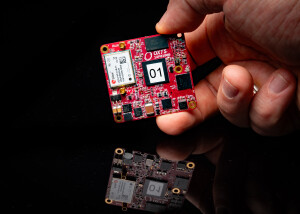
The xNAV650 is OxTS’ smallest (77 x 63 x 24 mm) and lightest (130 g) housed Inertial Navigation System (INS) yet. The device makes use of the latest cutting edge technology, to deliver the precision and reliability OxTS’ customers have come to expect. The xNAV650 provides surveyors with reliable and precise navigation data, even when budgets are limited.

Oxford Technical Solutions - OxTS
Bicester, GB
Description
Measuring only 77 x 63 x 24 mm the xNAV650 is our smallest INS to date. Its small form factor is ideal for any application where space is limited making it ideal for UAV-based mapping.
When weight is a factor look no further than the xNAV650 INS. Weighing just 130 g, the xNAV650 is the ideal partner when precision is crucial, but the payload needs to be as light as possible. A lighter payload and lower power consumption mean longer flight times for UAVs.
Don't let budget be a barrier to success. xNAV650 hardware bundles start at an affordable price meaning that surveyors can now integrate precise and reliable navigation data into their projects even when the budget is limited.
Quad constellation (GPS, GLONASS, BeiDou and Galileo) as standard means that users of the xNAV650 INS can benefit from 2 cm position accuracy even in the most challenging GNSS environments.
OxTS NAVsuite software is a complementary addition to OxTS’ range of inertial navigation systems including the xNAV650. The tools allow users of OxTS’ devices to configure, analyse and post-process their data with ease.
Options
The xNAV650 INS benefits from optional Precision Time Protocol (PTP) time-stamping functionality. All xNAV650 INS devices have the option to utilise PTP when synchronising time with LiDAR and other sensors that also utilise the feature. PTP allows for a much simpler set-up over ethernet, providing surveyors with the ability to get up and running quickly.
OxTS’ gx/ix tight-coupling technology ensures that users of OxTS inertial navigation systems receive the most accurate measurements possible even in tough GNSS conditions such as urban canyons.
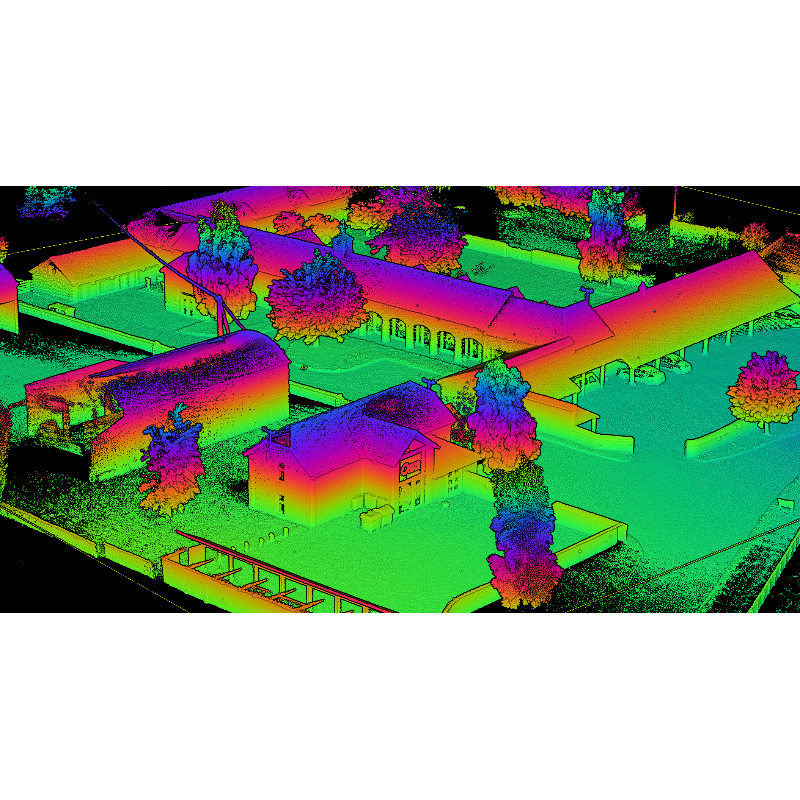
OxTS Georeferencer allows users of OxTS’ inertial navigation systems to georeference point clouds from almost any LiDAR sensor. By combining OxTS INS data with raw LiDAR data using OxTS Georeferencer, users can increase the quality of their point clouds, decrease the time to survey, intelligently analyse data and improve project ROI.
Boresight calibration is an optional feature within the OxTS Georeferencer software. If the coordinate systems of the two devices (INS and LiDAR) do not match perfectly then the georeferencing of LiDAR data will diverge over longer ranges and result in a less accurate point cloud. The boresight calibration feature within OxTS Georeferencer allows users to take advantage of a simple, data-driven method to calibrate the coordinate systems, meaning a more precise result.
Further reading:
OxTS LiDAR Surveying Brochure
Download the OxTS LiDAR Surveying brochure and learn more about LiDAR Surveying using an OxTS INS. The brochure introduces the benefits of integrating the inertial data provided by an OxTS INS with raw LiDAR data. The brochure also details the currently supported LiDAR sensors.
OxTS Boresight Calibration Brochure
Accurately measuring the angles between your navigation and survey devices can be difficult to get right. However, using a data-driven approach to calibrating these angles can dramatically reduce survey set-up time, increase survey repeatability and improve the final output. Read how this can be achieved with our Boresight Calibration brochure.
Case Study: Ordnance Survey
Ordnance Survey were in need of a quicker, scalable and more cost-effective way to collect georeferenced pointcloud data. They engaged with OxTS to understand what was achievable. As a result, they were able to create highly accurate pointclouds and reduce costs, all whilst improving the efficiency of their mobile mapping operations.
Case Study: Southern Cross University
Southern Cross university (SCU) is involved in a project to protect the Great Barrier Reef from the possible effects of climate change. Part of the cooling and shading sub-program of the Reef Restoration and Adaption Program, SCU needed to measure wind speed from a moving platform. To do this accurately they had to combine the measurements from a sonic anemometer and IMU. This case study details how OxTS were able to help.
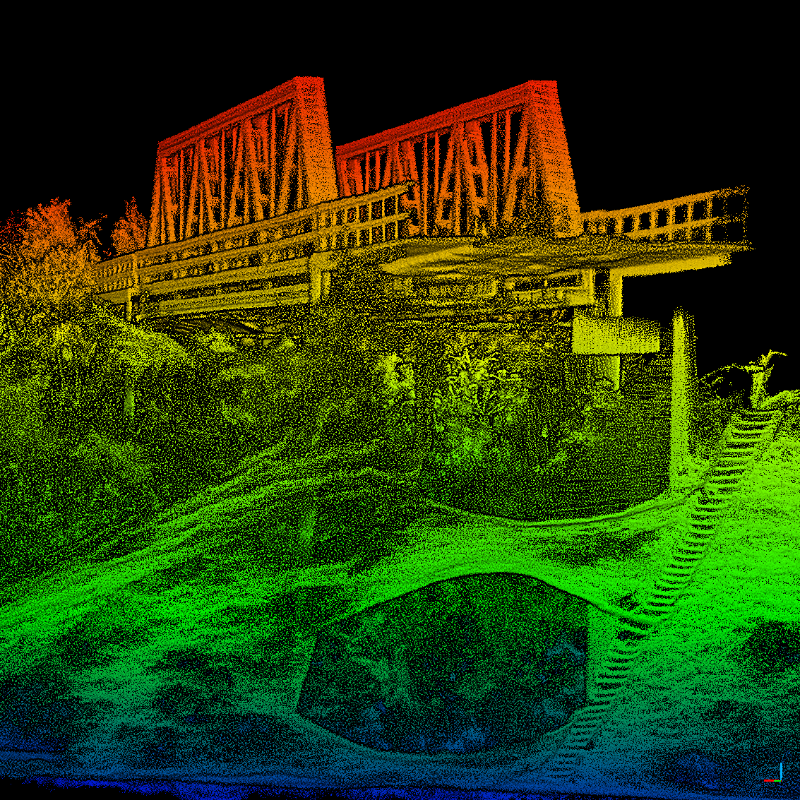
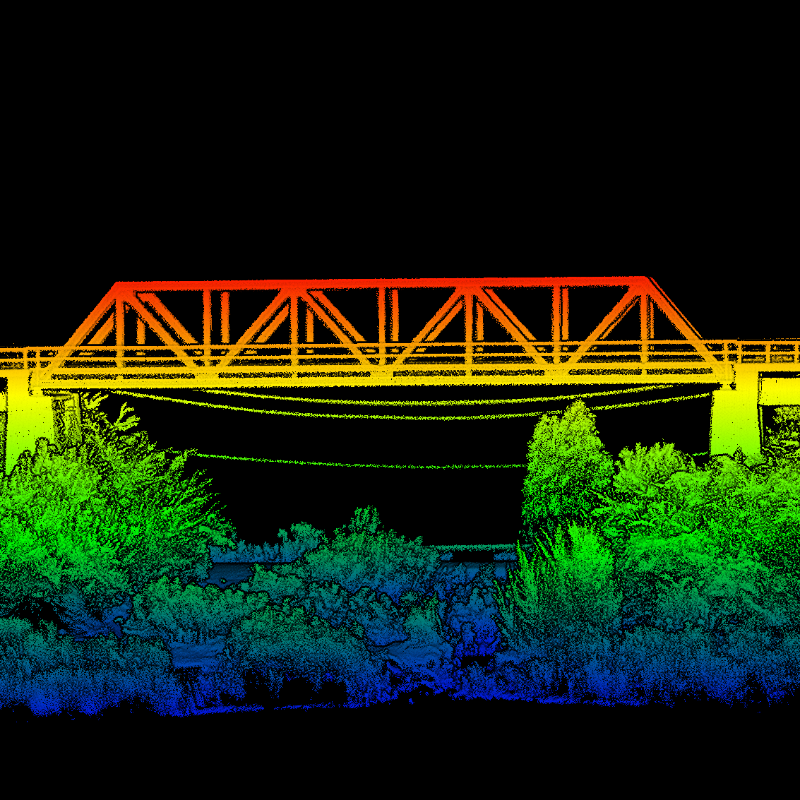
Case Study: Dronezone srl.
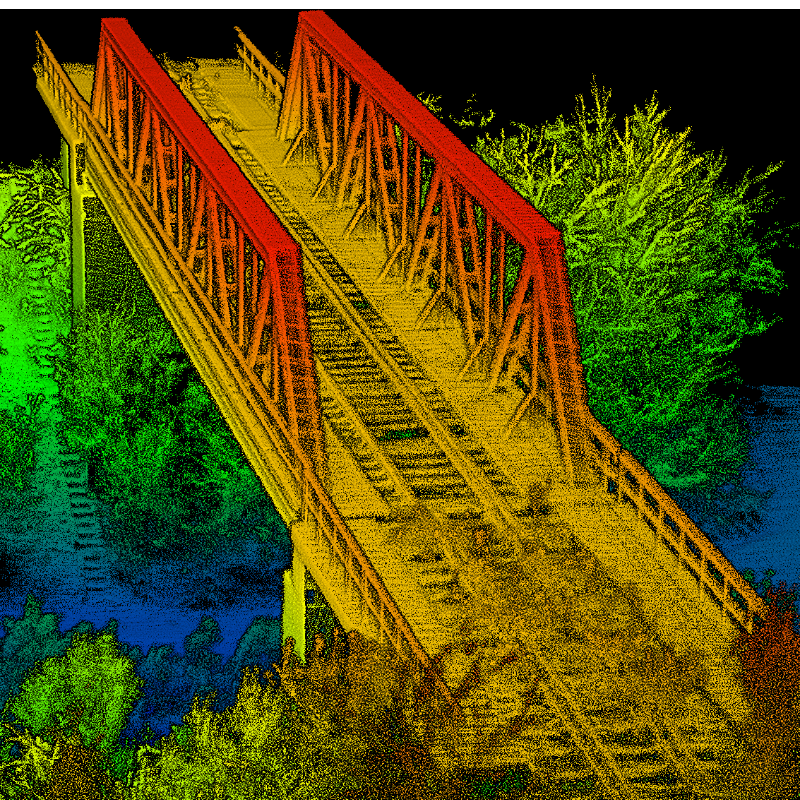
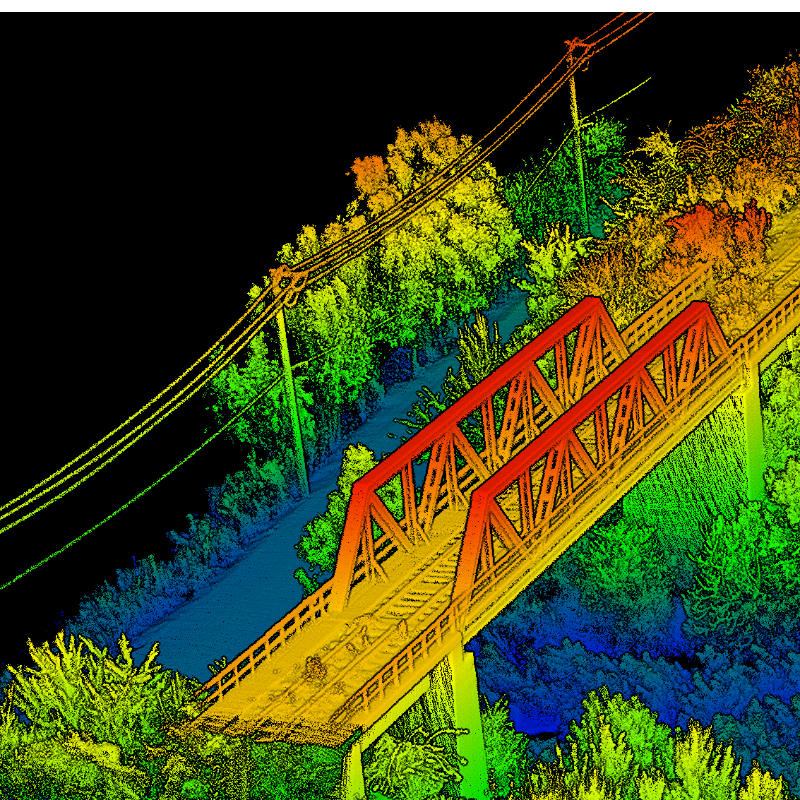
OxTS Partner Dronezone were tasked with scanning an ageing railway bridge to identify potential weaknesses in its structure. Once they made the decision to survey the bridge using a UAV, there were a number of challenges they faced, specifically around payload weight, flight time, data processing, point cloud accuracy and more. This case study details how they overcame them.
Do you have questions about this product?
- Questions about price, availability, and/or retailers
- Questions about technical specifications and usage
- Questions about suitability for your project or application
Specifications
-
Other specifications
-
Export restrictions
No export restrictions
Graphical user interface
Y
Typical application
UAV direct georeferencing; LiDAR scanning; Hyperspectral imaging; Mobile mapping
Distinguishable features
Dual frequency GNSS receivers; RTK accuracy; Dual antenna; Compact IP65 enclosure; No export control; Tight coupling; Post-processing software included
-
Environmental
-
Non-operating shock tolerance [g]
15
Operating shock tolerance [g]
15
Min. operating temperature [°C]
-40
Max. operating temperature [°C]
70
-
Software
-
Name
NAVsuite (complimentary)
-
GNSS aided uncertainty
-
Heading [deg]
0.1
Pitch [deg]
0.03
Roll [deg]
0.03
-
General
-
Type of application
Air, Land
Year of initial development
2020
Height [mm]
24
Width [mm]
63
Length [mm]
77
Weight [kg]
0.13
Power consumption [W]
4
Splashproof casting
Y
Water resistant casting
N
Type of accelerometer
MEMS
Type of gyro
MEMS
Removable from base plate
N
Moving parts
N
Min. Voltage (DC)
5
Max. Voltage (DC)
30
-
GNSS Positioning Sensor
-
Number of integrated GNSS receivers and antenna ports
2
Tracked satellite signals
GPS L1, GPS L2 (QZSS), GLONASS L1, GLONASS L2, BeiDou B1, Beidou B2, Galileo E1, Galileo E5
RTK Network Compatibility
Y
-
Data formats
-
NMEA formats
NMEA Standard ASCII
Other
NCOM
-
Inertial Measurement Unit
-
Accelerometer bias [µ-g]
80
gyro bias [deg/hr]
5
Calibration procedure
Temperature calibration
-
GNSS positional accuracy
-
Horizontal Position Accuracy [ RMS in cm ]
40
Horizontal Position Accuracy (RTK) [ RMS in cm ]
1.5
Documents
Brochure
OxTS-2023-XNAV650 Datasheet.pdf
6.7 MB






{kind=link}