Voyis VSLAM Powered by EIVA NaviSuite
{kind=link}
Presented by:
Head of Offshore Energy at Voyis, Sean Elmer
Business Development Manager – Subsea Robotics & AI at EIVA, Mike Gallo
Co-pilot:
Survey Support & Training at EIVA, Maria Antônia Ribeiro
We will cover subjects such as:
Challenges and benefits of using stereo cameras for subsea survey and inspection operations
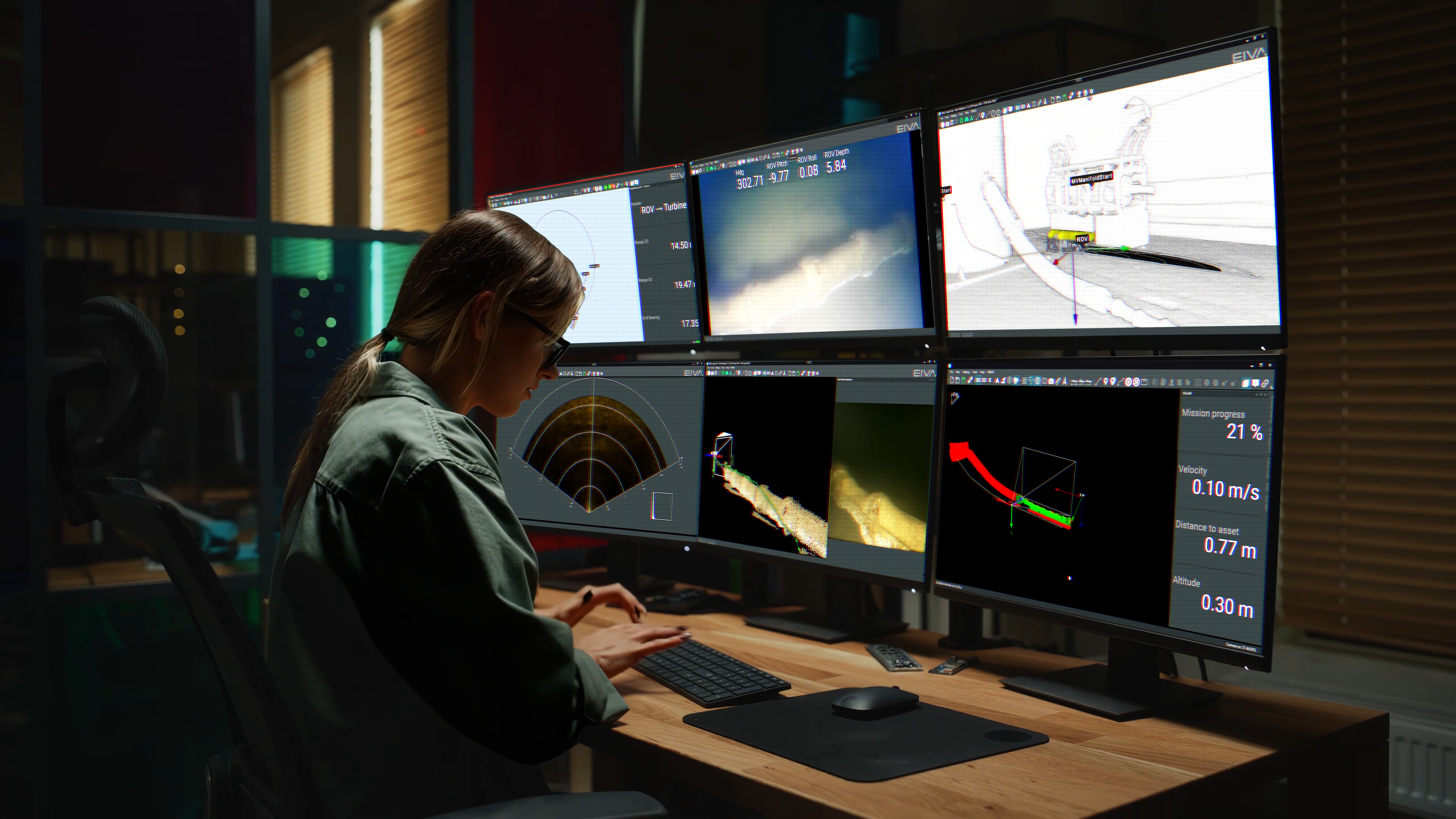
Examples of the output of our VSLAM solution: real-time 3D point clouds for quality control and augmented piloting
Details of the VSLAM algorithm, integration with the Discovery Stereo Camera and with NaviSuite software for streamlined operations not requiring third-party software
Use cases, including examples from a joint demo at the ORE Catapult Subsea and Marine testing facility
How this solution is an important tool towards achieving subsea robotics true autonomy
Duration: 1 hour incl Q&A sessions
Tags
