
Phins
FOG based high-performance inertial navigation system
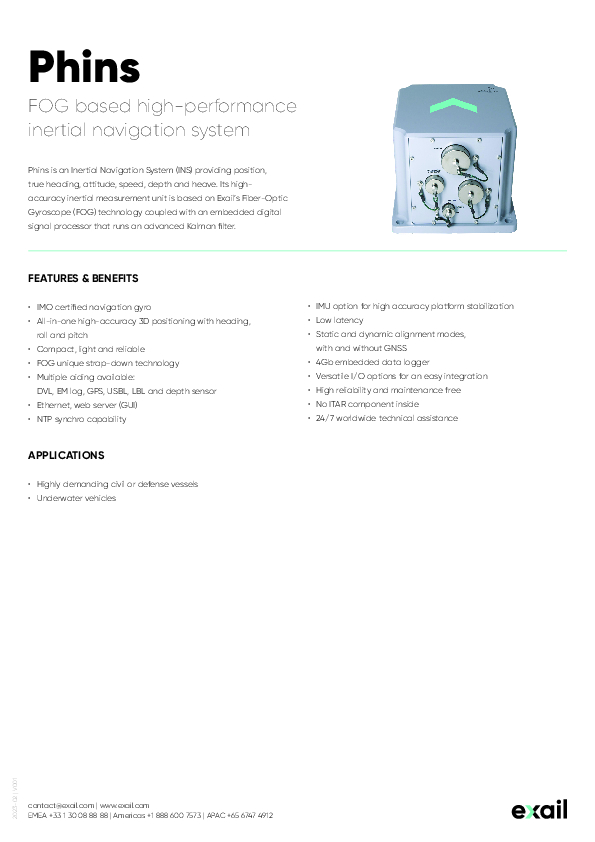
Phins is an Inertial Navigation System (INS) providing position, true heading, attitude, speed, depth and heave. Its highaccuracy inertial measurement unit is based on Exail’s Fiber-Optic Gyroscope (FOG) technology coupled with an embedded digital signal processor that runs an advanced Kalman filter.

Exail
Saint Germain en Laye, FR
Description
Phins is an Inertial Navigation System (INS) providing position, true heading, attitude, speed, depth and heave. Its highaccuracy inertial measurement unit is based on Exail’s Fiber-Optic Gyroscope (FOG) technology coupled with an embedded digital signal processor that runs an advanced Kalman filter.
Features & Benefits
- IMO certified navigation gyro.
- All-in-one high-accuracy 3D positioning with heading, roll and pitch.
- Compact, light and reliable.
- FOG unique strap-down technology.
- Multiple aiding available: DVL, EM log, GPS, USBL, LBL and depth sensor.
- Ethernet, web server (GUI).
- NTP synchro capability.
- IMU option for high accuracy platform stabilization.
- Low latency.
- Static and dynamic alignment modes, with and without GNSS.
- 4Gb embedded data logger.
- Versatile I/O options for an easy integration.
- High reliability and maintenance free.
- No ITAR component inside.
- 24/7 worldwide technical assistance
Applications
- Highly demanding civil or defense vessels.
- Underwater vehicles
Do you have questions about this product?
- Questions about price, availability, and/or retailers
- Questions about technical specifications and usage
- Questions about suitability for your project or application
Specifications
-
Other specifications
-
Typical application
Surface navigation for frigates, MCMV and fast patrol boats - AUV - ROV - HOS - SDV
Distinguishable features
Complete navigation unit- No spinning element hence maintenance free- Versatile- Appropriate for all underwater vehicles
Export restrictions
Dual use
Graphical user interface
Y
-
Environmental
-
Max. rotation speed [deg/s]
750
Min. operating temperature [°C]
-20
Max. operating temperature [°C]
55
Operating shock tolerance [g]
27
-
Software
-
Integrity monitoring of position input
Y
Integrity monitoring of log input
Y
Maximum latency of position input [ms]
10
Maximum latency of log input [ms]
100
Name
Optional post-processing software: APPS / Delph INS
Filtering
Y
Max. number of position input signals
2
Max. number of log input signals
2
-
Doppler log aided uncertainty
-
Pitch [deg]
0.02
Roll [deg]
0.02
Surge/sway [m]
0.025
Decrease in position accuracy [m/hr]
0.05
-
GNSS aided uncertainty
-
Heading [deg]
0.01
Pitch [deg]
0.01
Roll [deg]
0.01
Heave: constant part [m]
0.02
Heave: variable part [%]
2.5
Increase in position uncertainty w.r.t. stand-alone GPS [m]
0.8
-
General
-
Year of initial development
2000
Height [m]
0.162
Width [m]
0.18
Length [m]
0.18
Weight [kg]
5.5
Min. Voltage (DC)
20
Max. Voltage (DC)
32
Power consumption [W]
15
Splashproof casting
Y
Water resistant casting
N
Mean time between failures [hr]
100000
Type of accelerometer
Pendulum
Type of gyro
Fiber Optic Gyroscope
Removable from base plate
Y
Type of application
Marine
Height [mm]
162
Width [mm]
180
Length [mm]
190
Moving parts
N
-
EM log aided uncertainty
-
Pitch [deg]
0.05
Roll [deg]
0.05
Surge/sway [m]
0.025
Decrease in position accuracy [m/hr]
0.05
Heading [deg]
0.05
-
GNSS Positioning Sensor
-
Number of integrated GNSS receivers and antenna ports
0
-
Unaided uncertainty
-
Pitch [deg]
0.05
Roll [deg]
0.05
Heave [m]
0.01
Surge/sway [m]
0.025
Decrease in position accuracy [m/hr]
0.05
-
Data formats
-
Other
ASCII; BINARY
NMEA formats
NMEA0183, ASCII, BINARY
-
Inertial Measurement Unit
-
gyro bias [deg/hr]
500
Calibration procedure
Factory calibration
Documents
Brochure
Datasheet_Phins.pdf
234.21 KB








{kind=link}