
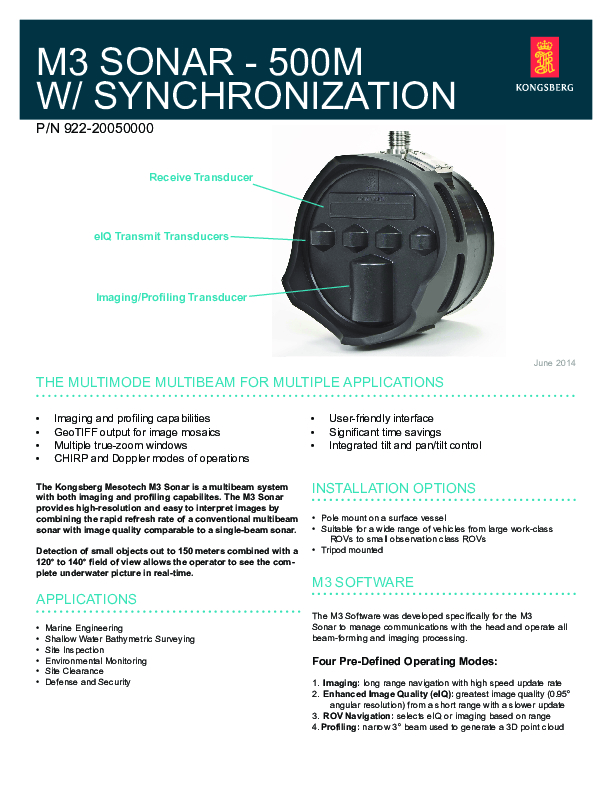
M3 Sonar
Generates imaging and bathymetric datasets from one sonar head
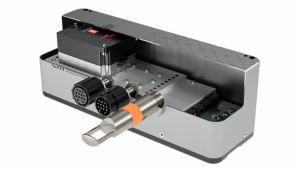
The innovative design of the M3 Sonar uses two sets of complementary transducers which allow it to generate both imaging and bathymetric data with the same head. Unique to the M3 Sonar is the patented eIQ (enhanced image quality) mode of operation that generates multibeam images with unprecedented clarity.

Kongsberg Discovery
Horten, NO
Description
The innovative design of the M3 Sonar uses two sets of complementary transducers which allow it to generate both imaging and bathymetric data with the same head. Unique to the M3 Sonar is the patented eIQ (enhanced image quality) mode of operation that generates multibeam images with unprecedented clarity.
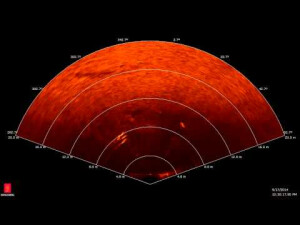
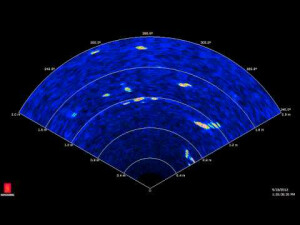
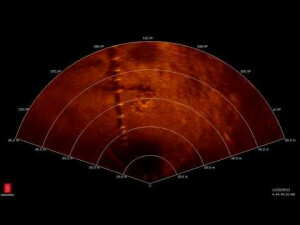
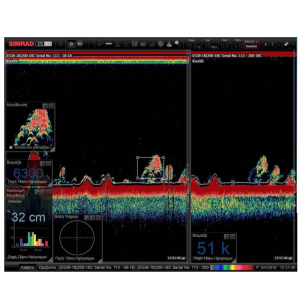
The M3 Sonar has the ability to configure applications using complex pulses. The system allows the operator to interleave active pings and passive listening modes, Doppler, multiple true-zoom windows (up to 4) with linear FM and CW imaging modes of operation.
Data outputs are compatible with various third party software such as Caris, EIVA, Hypack and QINSy. The M3 Sonar has the ability to produce real-time 3D point clouds enabling fast target or object detection. Ideal for shallow water surveys on USV/ASV/ROV and dual head deployment.
Do you have questions about this product?
- Questions about price, availability, and/or retailers
- Questions about technical specifications and usage
- Questions about suitability for your project or application
Specifications
-
Physical properties of transducer head
-
Length [m]
0.22
Width [m]
0.22
Height [m]
0.16
Min. external power [V]
12
Max. external power [V]
36
Max. power consumption [W]
22
-
Speed of sound
-
Real-time correction of refraction at transducer head
Y
-
Interfaces
-
Compatible software
The M3 Software was developed specifically for the M3 system to manage communications with the sonar head and operate all beam-forming and imaging processing.Four Pre-Defined Modes1) Imaging: Long range navigation with high speed update2) Enhanced Image Quality (eIQ): Greatest image quality (0.95° angular resolution) from a short range with a slower update3) ROV Navigation: Selects eIQ or imaging based on range4) Profiling: Narrow 3° beam used to generate a 3D point cloudSupported data acquisition software:- Hypack Hysweep- QPS QINSy- EIVA NaviSuite- OIC SAMM- Forum VisualSoft SuiteSupported post processing software- CARIS HIPs & SIPs- Hypack- QPS QINSy- EIVA NaviSuite- Forum VisualSoft Suite
Compatible hardware
The M3 comes as a complete working system. It can be pole mounted on a surface vessel. The system is also suitable for a wide range of vehicles from large work-class ROVs to small observation class ROVs.
Real-time access procedure
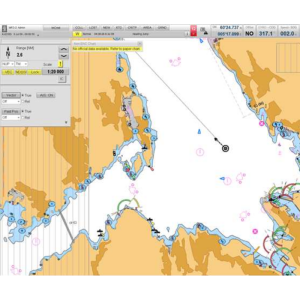
Operator can see the complete underwater picture in real time.
-
Motion compensation
-
Motion sensors compatible to the system
System comes with Integrated tilt and pan/tilt con
Motion stabilized
N
-
Mounting and deployment
-
Mounting
Portable
Retractable
Y
-
Used Sonar Methods
-
Type of system
Multibeam Imaging & Multibeam Echosounder
Bottom Detection Method
Amplitude / Phase / Blend
Sonar type
Beam-forming
-
System Parameters
-
Min. frequency [kHz]
500
Max. frequency [kHz]
1400
Min. depth [m]
0.2
Max. depth [m]
150
Depth resolution [mm]
10
Max. Slant Range [m]
150
Max. swath as a function of depth
175
Max. pings / second
40
Ping frequency [Hz]
40
Min. beam width across track [deg]
0.95
Min. beam width along track [deg]
3
Available frequenties
500 kHz or 700-1400 kHz
Simultaneous multiple frequencies
No
High resolution mode
YES
Number of beams
256
Transducer Type
Portable
Pulse length
CW-FM
-
Bottom Coverage
-
Equi-angular/equi-distant mode
Equi-angular, Equi-distant
Backscatter
Y
Water column
Y
-
Uncertainty
-
Intended S44 order
Special
-
More information
-
Distinguishable features
Imaging & profiling abilities, time savings
-
General
-
Date of first release
2011
Documents
Brochure
migration8tg758.pdf
461.45 KB
Other documents
-
Shallow-Water Maritime Security Sonar System4.03 MB
-
M3 Sonar® Case Study: Survey of Debris Accumulation at a Nuclear Power Plant (2)1.5 MB






{kind=link}