






IMU-NAV-100 Grade A
High Precision MEMS Inertial Measurement Unit
The Inertial LabsInertial Measurement Unit (IMU-NAV) is the latest addition to the Inertial Labs Advanced MEMS sensor-based family. Revolutionary due to its compact, self-contained strapdown, tactical grade Inertial Measurement Systems and Pitch & Roll Sensor, that measures linear accelerations, angular rates, Pitch & Roll with three-axis high-grade MEMS accelerometers and three-axis tactical grade MEMS gyroscopes.

Inertial Labs, Inc.
Paeonian Springs, US
Description
The Inertial LabsInertial Measurement Unit (IMU-NAV) is the latest addition to the Inertial Labs Advanced MEMS sensor-based family. Revolutionary due to its compact, self-contained strapdown, tactical grade Inertial Measurement Systems and Pitch & Roll Sensor, that measures linear accelerations, angular rates, Pitch & Roll with three-axis high-grade MEMS accelerometers and three-axis tactical grade MEMS gyroscopes. Angular rates and accelerations are determined with high accuracy for both motionless and dynamic applications.
The Inertial Labs IMU-NAV is a breakthrough, fully integrated inertial solution that combines the latest MEMS sensor technologies. Fully calibrated, temperature compensated, mathematically aligned to an orthogonal coordinate system, the IMU contains up to 0.5 deg/hr gyroscopes and 0.003 mg bias in-run stability accelerometers with very low noise and high reliability.
Continuous Built-in Test (BIT), configurable communications protocols, electromagnetic interference (EMI) protection, and flexible input power requirements make the Inertial Labs IMU-NAV easy to use in a wide range of higher order integrated system applications.
The Inertial Labs IMU-NAV models were designed for applications, like:
- Antenna and Line of Sight Stabilization Systems
- Passenger trains acceleration / deceleration and jerking systems
- Motion Reference Units (MRU)
- Motion Control Sensors (MCS)
- Gimbals, EOC/IR, platforms orientation and stabilization
- GPS-Aided Inertial Navigation Systems (INS)
- Attitude and Heading Reference Systems (AHRS)
- Land vehicles navigation and motion analysis
- Buoy or Racing Boat Motion Monitoring
- UAV & AUV/ROV navigation and control
Do you have questions about this product?
- Questions about price, availability, and/or retailers
- Questions about technical specifications and usage
- Questions about suitability for your project or application
Specifications
-
Environment
-
Min. operating temperature [C]
-40
Max. operating temperature [C]
85
Splashproof casting
Y
Water resistant casting
N
Casting and coating
IP67
Vibration
7g, 20 – 2000 Hz
Shock
1500g
-
Power Supply
-
Min. Voltage (DC)
5
Max. Voltage (DC)
30
Power consumption [W]
0.8
-
Accelerometers
-
Num. of Accelerometers
3
Range [max g]
40
Bandwidth [ Hz ]
260
Alignment Error [ ± ° ]
0.0086
In-Run Bias Stability [mg]
0.015
Non-linearity [ % ]
0.015
Noise
0.025 m/sec/√hr
-
Operational
-
Interface types
Digital
Interfaces
RS-322, RS-422
Output data formats
Accelerations, Angular rates, Pitch, Roll, Relative Heading, Temperature, Synchronization output
Output frequency [ Hz ]
2000
Max. rotation speed [deg/s]
950
Start up time [s]
1
-
Gyroscopes
-
Num. of Gyroscopes
3
Range [± ° / sec]
950
In-Run Bias Stability [ °/ hr]
0.5
Bandwidth [ Hz ]
260
Non-linearity [ % ]
0.01
Alignment Error [ ± ° ]
0.0086
Resolution [ ° / s ]
0.01
Noise
0.1 deg/√hr for Tactical A, 0.04 deg/√hr for Tactical S
-
General
-
Year of last update
2021
Year of initial development
2020
System components
Accelerometer(s), Gyroscope(s), Temperature sensor
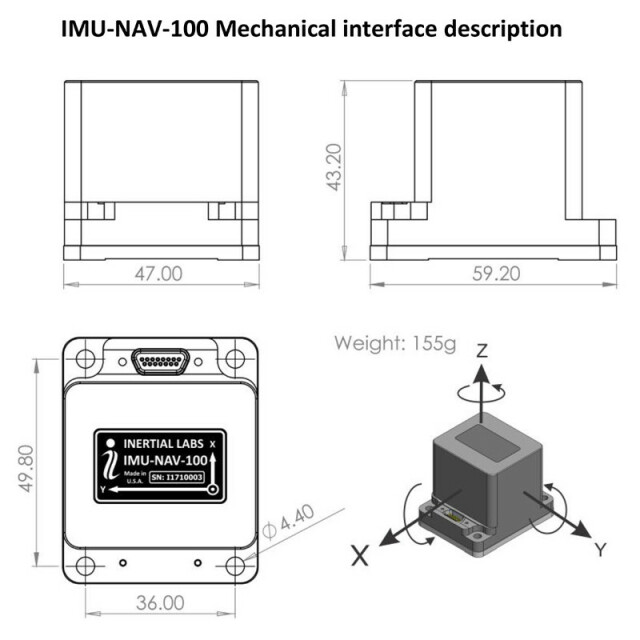
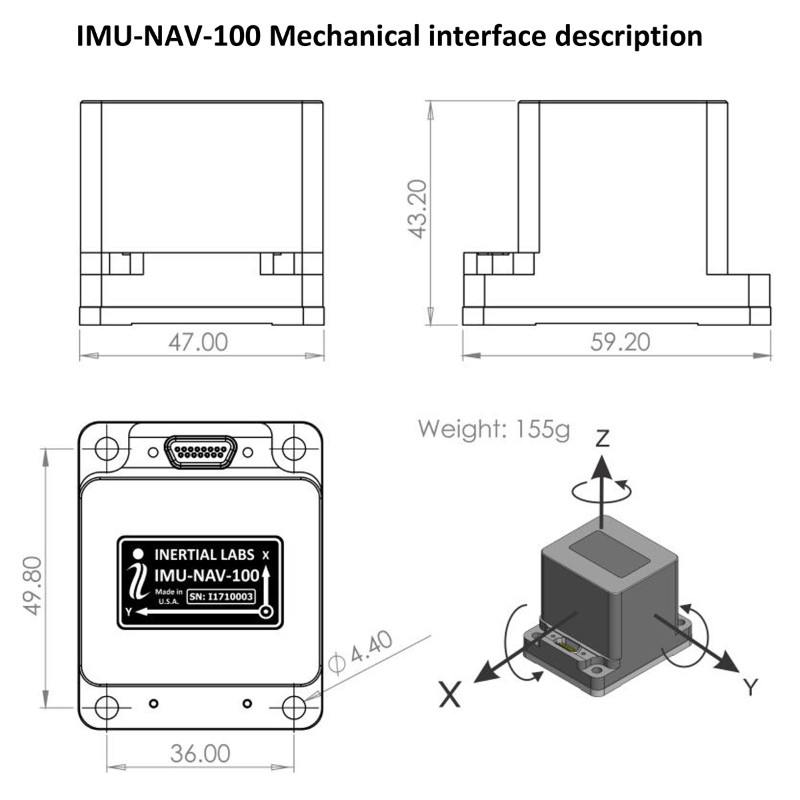
Height [mm]
59.2
Width [mm]
48.2
Length [mm]
48.2
Weight [gr]
155
-
Additional specifications
-
Distinguishable features
ITAR free, Navigation Grade, MIL-STD-810G compliant
Application
Antenna and Line of Sight Stabilization Systems ❖ Passengers trains acceleration / deceleration and jerking systems ❖ Motion Reference Units (MRU) ❖ Motion Control Sensors (MCS) ❖ Gimbals, EOC/IR, platforms orientation and stabilization ❖ GPS-Aided Inertial Navigation Systems (INS) ❖ Attitude and Heading Reference Systems (AHRS) ❖ Land vehicles navigation and motion analysis ❖ Buoy or Racing Boat Motion Monitoring ❖ UAV & AUV/ROV navigation and control
-
Accuracy
-
Pitch and Roll dynamic accuracy [ ° ]
0.06
Pitch and Roll static accuracy [ ° ]
0.03
Documents
Brochure
imu-nav-100-datasheet-rev1-6-october-2021.pdf
1.22 MB


![YRBKMWXn[1].png](https://cdn.geo-matching.com/En53gY1o.png?w=300&h=300&crop=1&s=024b01a5456af84a24979824702460d7)





{kind=link}