

















IMU-P Tactical-A
Professional Inertial Measurement Unit
The Inertial Labs Inertial Measurement Unit (IMU-P) is an Advanced MEMS sensors based, compact, self-contained strapdown, industrial and tactical grade Inertial Measurement Systems and Digital Tilt Sensor, that measures linear accelerations, angular rates, Pitch & Roll with three-axis highgrade MEMS accelerometers and three-axis tactical grade MEMS gyroscopes.

Inertial Labs, Inc.
Paeonian Springs, US
Description
The Inertial Labs Inertial Measurement Unit (IMU-P) is an Advanced MEMS sensors based, compact, self-contained strapdown, industrial and tactical grade Inertial Measurement Systems and Digital Tilt Sensor, that measures linear accelerations, angular rates, Pitch & Roll with three-axis highgrade MEMS accelerometers and three-axis tactical grade MEMS gyroscopes. Angular rates and accelerations are determined with high accuracy for both motionless and dynamic applications. The Inertial Labs IMU-P is breakthrough, fully integrated inertial solutions that combine the latest MEMS sensors technology.
Fully calibrated, temperature compensated, mathematically aligned to an orthogonal coordinate system, IMU demonstrate less than 1 deg/hr gyroscopes and 0.005 mg accelerometers bias inrun stability with very low noise and high reliability.
Continuous Built-in Test (BIT), configurable communications protocols, electromagnetic interference (EMI) protection, and flexible input power requirements make the Inertial Labs IMU-P easy to use in a wide range of higher order integrated system applications.
The Inertial Labs IMU-P models are able to get an aiding data from external source of GNSS and then to output full spectrum of INS data (Positions, Attitude, Velocity and Time).
The Inertial Labs IMU-P was designed for applications, like:
- Antenna and Line of Sight Stabilization Systems
- Passengers trains acceleration / deceleration and jerking systems
- Motion Reference Units (MRU)
- Motion Control Sensors (MCS)
- Gimbals, EOC/IR, platforms orientation and stabilization
- GPS-Aided Inertial Navigation Systems (INS)
- Attitude and Heading Reference Systems (AHRS)
- Land vehicles navigation and motion analysis
- Buoy or Racing Boat Motion Monitoring
- UAV & AUV/ROV navigation and control
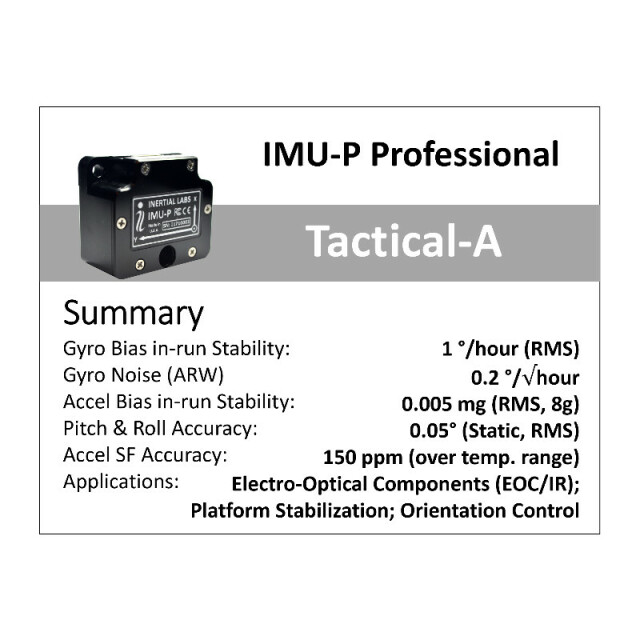
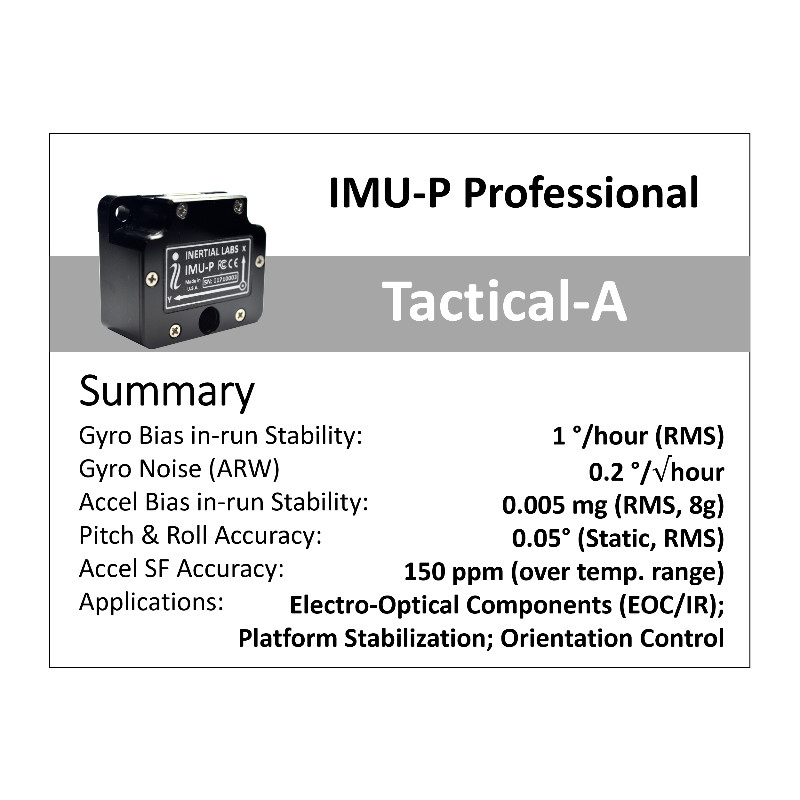
IMU-P Tactical-A
GYROSCOPES
Gyroscopes Bias in-run stability: 1 deg/hr
Gyroscopes Bias residual error: 30 deg/hr
Gyroscopes Angular Random Walk: 0.2 deg/√hr
ACCELEROMETERS (±8 g range)
Accelerometers Bias in-run stability: 0.005 mg
Accelerometers Bias residual error: 0.5 mg
Accelerometers Velocity Random Walk: 0.015 m/sec/√hr
PITCH & ROLL
Pitch & Roll static accuracy, RMS: 0.05 deg
Pitch & Roll dynamic accuracy, RMS: 0.08 deg
Do you have questions about this product?
- Questions about price, availability, and/or retailers
- Questions about technical specifications and usage
- Questions about suitability for your project or application
Specifications
-
Environment
-
Non-operating shock tolerance [g]
3000
Operating shock tolerance [g]
1500
Min. operating temperature [C]
-40
Max. operating temperature [C]
85
Splashproof casting
Y
Water resistant casting
Y
Water resistance [m]
1.5
Casting and coating
Yes
-
Power Supply
-
Min. Voltage (DC)
30
Max. Voltage (DC)
5
Power consumption [W]
0.8
-
Accelerometers
-
Num. of Accelerometers
3
Range [max g]
40
Resolution [mg]
0.001
In-Run Bias Stability [mg]
0.005
Bandwidth [ Hz ]
260
Non-linearity [ % ]
0.05
Noise
0.025
Alignment Error [ ± ° ]
0.008
-
Operational
-
Max. rotation speed [deg/s]
950
Interface types
Digital
Interfaces
RS-422
Other interfaces and additional information
RS-232 as well. Same electrical & mechanical interface as Sensonor STIM-300 IMU
Start up time [s]
1
Output data formats
Binary, ASCII characters
Output frequency [ Hz ]
2000
-
Pressure sensor
-
Pressure sensor
N
Measurement range [ Pa ]
0
In-Run Bias Stability [ RMS Pa ]
0
Noise
0
Accuracy pressure sensor
0
-
Gyroscopes
-
Num. of Gyroscopes
3
Range [± ° / sec]
950
Resolution [ ° / s ]
0
In-Run Bias Stability [ °/ hr]
1
Bandwidth [ Hz ]
260
Non-linearity [ % ]
0.01
Noise
0.004
Alignment Error [ ± ° ]
0.008
-
General
-
Year of last update
2018
Year of initial development
2015
System components
Accelerometer(s), Gyroscope(s), Temperature sensor
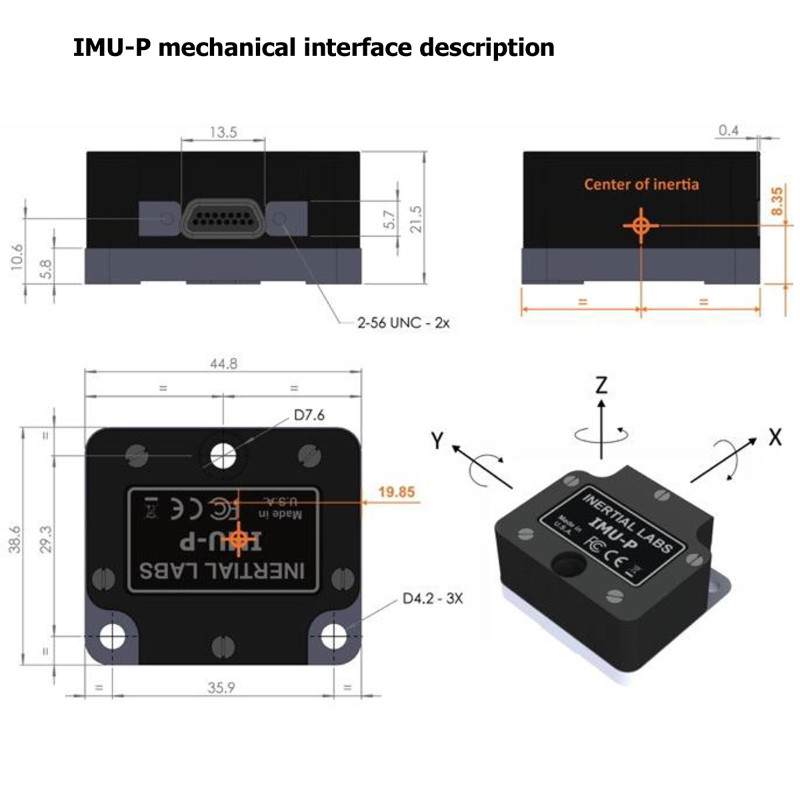
Height [mm]
22
Width [mm]
39
Length [mm]
45
Weight [gr]
70
-
Magnetometers
-
Num. of Magnetometers
0
Range [ ± Gauss ]
0
Resolution [ microtesla ]
0
In-Run Bias Stability [ nT ]
0
Bandwidth [ Hz ]
0
Non-linearity [ max % ]
0
Noise
0
-
Additional specifications
-
Distinguishable features
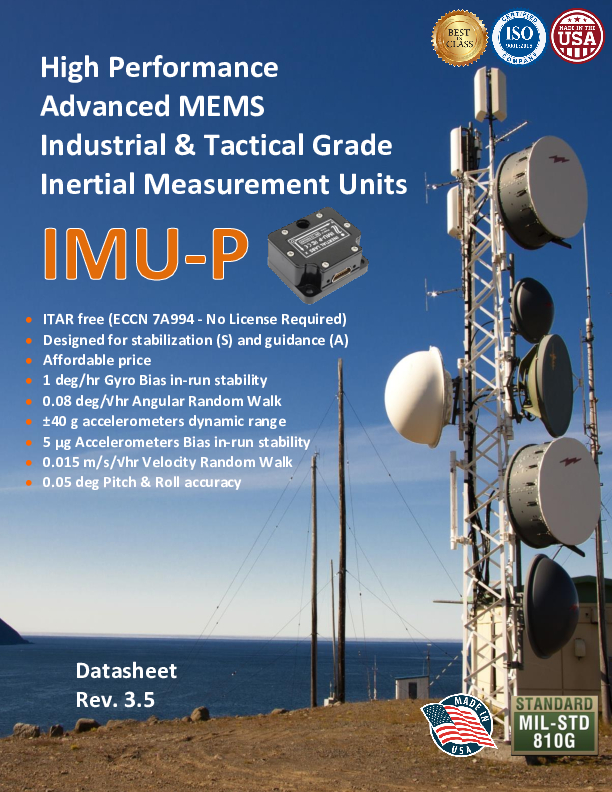
• ITAR-free• Same mechanical & electrical interfaces as STIM-300• Affordable price• 1 deg/hr gyroscopes Bias in-run stability• 0.005 mg accelerometers Bias in-run stability• 0.004 deg/sec√Hz gyroscopes noise (PSD)• 0.025 mg√Hz accelerometers noise (PSD)• Advanced, extendable, embedded Kalman Filter• Full temperature calibration of all sensing elements• Up to 800Hz data rate• Environmentally sealed (IP67)
Application
• Antenna and Line of Sight Stabilization Systems• Passengers trains acceleration / deceleration and jerking systems• Motion Reference Units (MRU)• Motion Control Sensors (MCS)• Gimbals, EOC/IR, platforms orientation and stabilization• GPS-Aided Inertial Navigation Systems (INS)• Attitude and Heading Reference Systems (AHRS)• Land vehicles navigation and motion analysis• Buoy or Racing Boat Motion Monitoring• UAV & AUV/ROV navigation and control
-
Accuracy
-
Heading static accuracy [ ° ]
0
Heading dynamic accuracy [ ° ]
0
Pitch and Roll static accuracy [ ° ]
0.05
Pitch and Roll dynamic accuracy [ ° ]
0.08
Documents
Brochure
imu-p-datasheet-rev3-5-april-2021.pdf
972.31 KB




![YRBKMWXn[1].png](https://cdn.geo-matching.com/En53gY1o.png?w=300&h=300&crop=1&s=024b01a5456af84a24979824702460d7)





{kind=link}