







GeoSwath 4 500 kHz
Wide Swath Bathymetry and Side Scan System
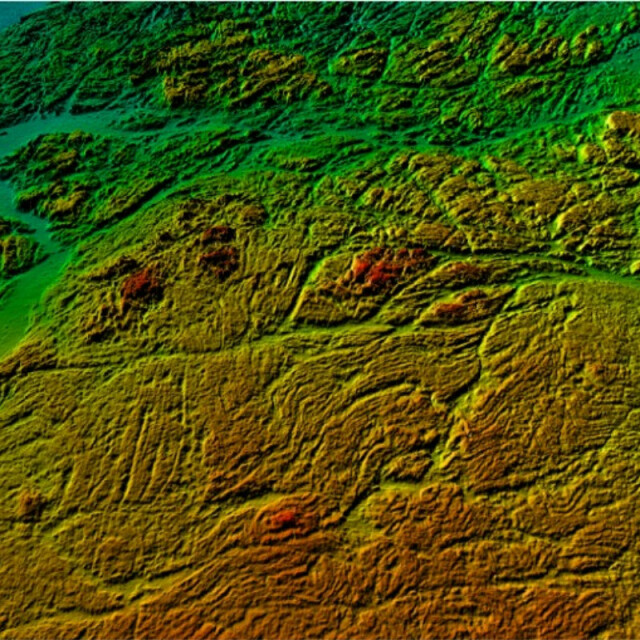
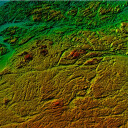
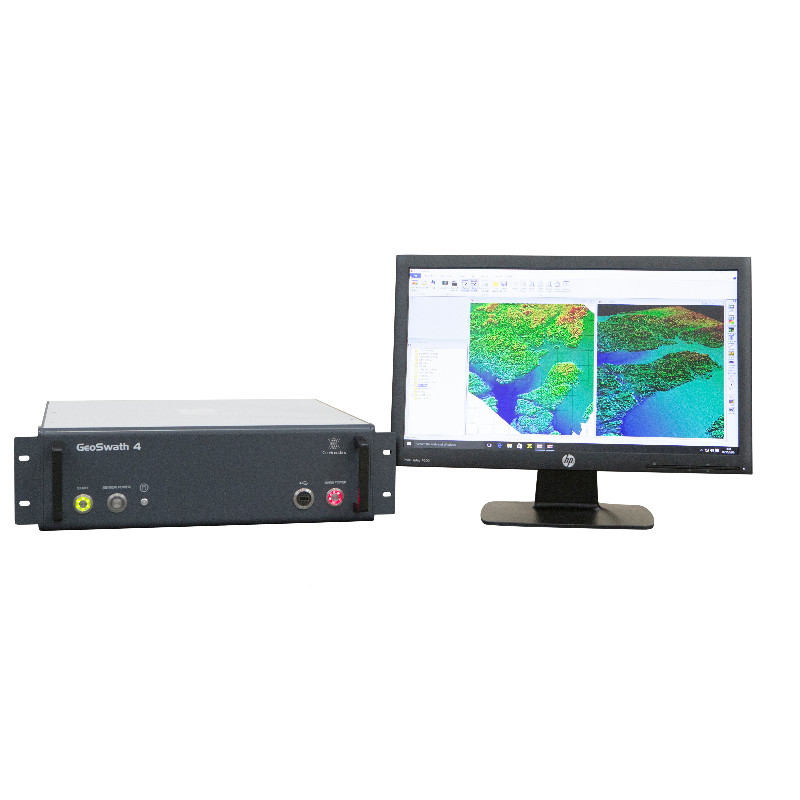
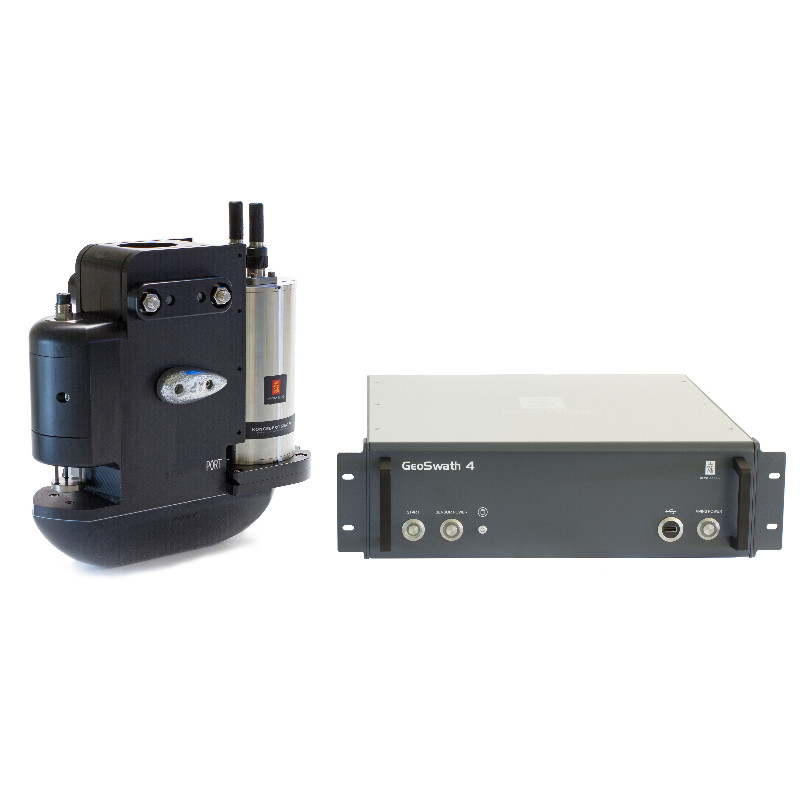
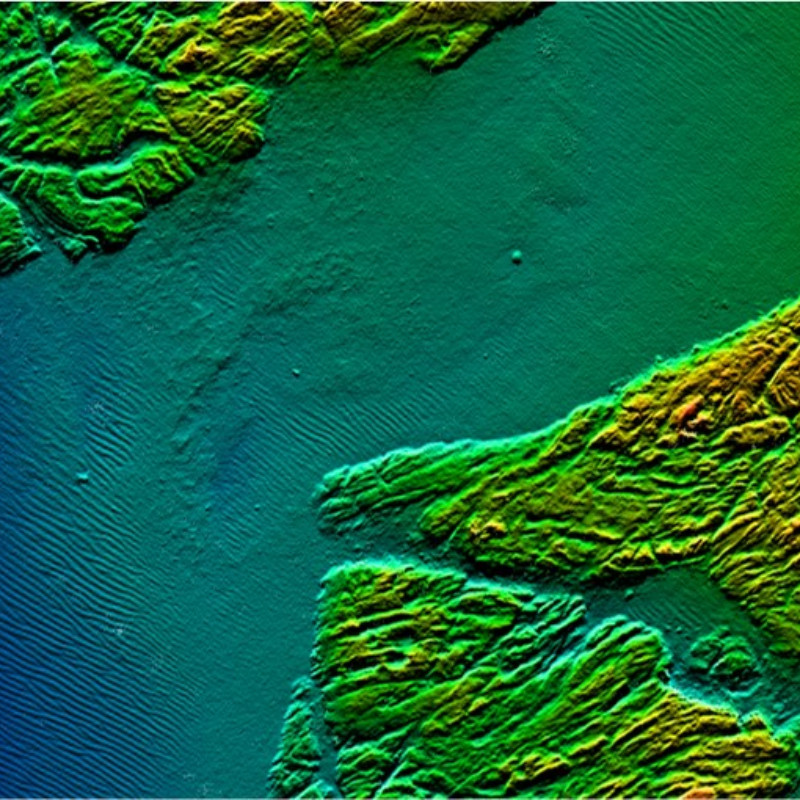
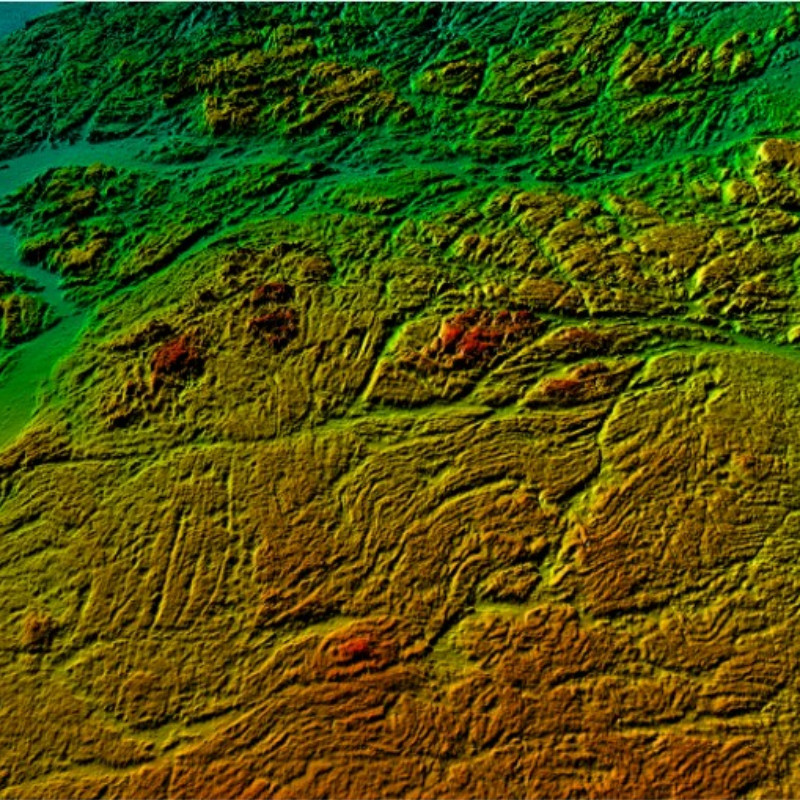
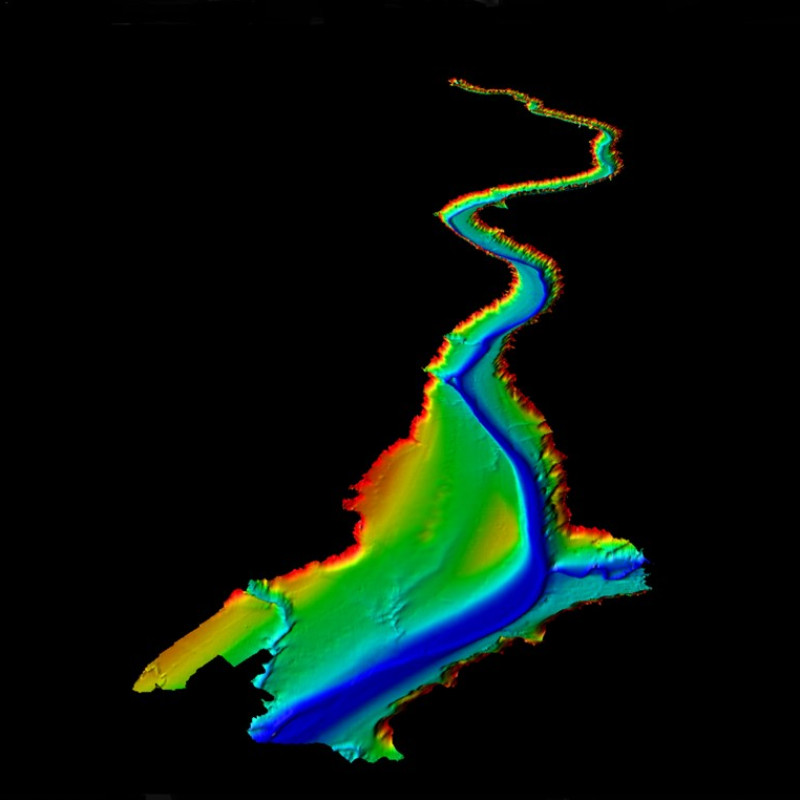
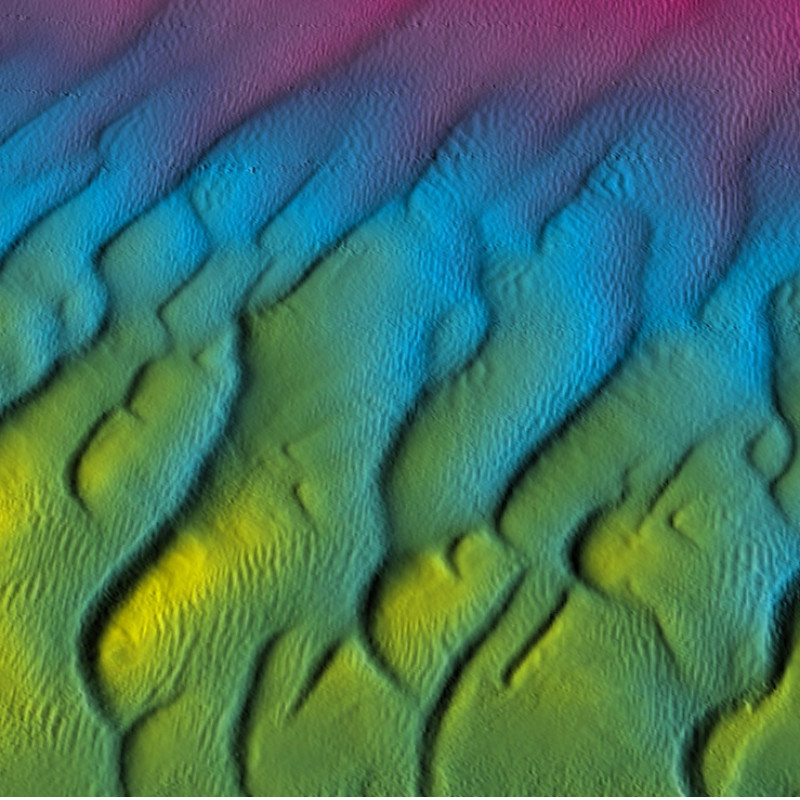
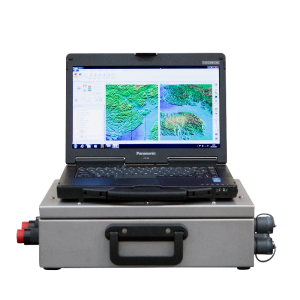
GeoSwath 4 provides simultaneous swath bathymetry and side scan sonar mapping for shallow waters. As of 2023, it features state-of-the-art AI-powered processing, which provides high-quality data in near real-time. The system comprises a dual transducer head with versatile mounting options, and deck unit with all sonar electronics and a high-spec PC running the GS4 software for acquisition, calibration, and data processing.

GeoAcoustics Ltd
Great Yarmouth, GB
Description
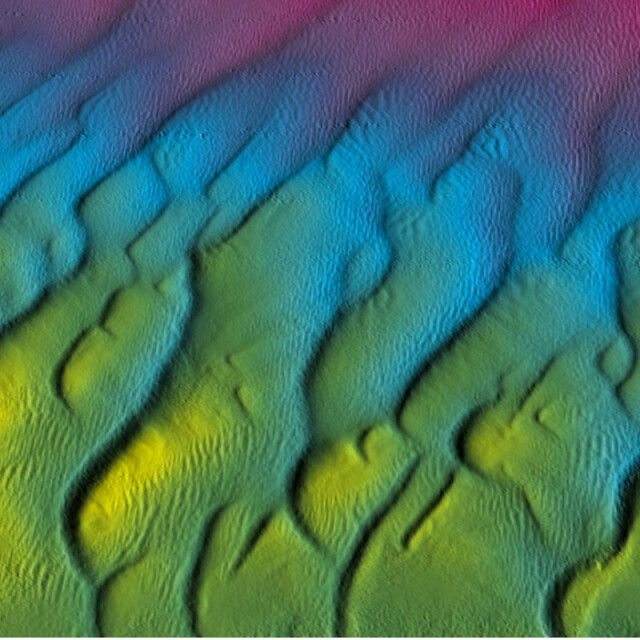
The specifically developed GS4 acquisition and processing software included with the system delivers automatically cleaned data in real time.
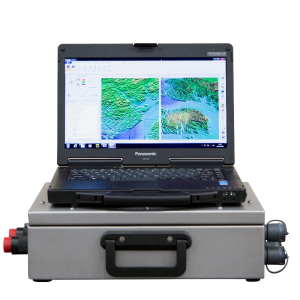
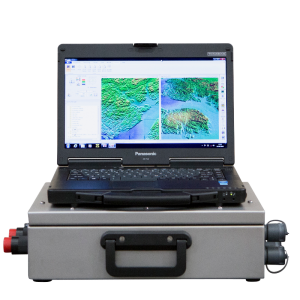
System Components
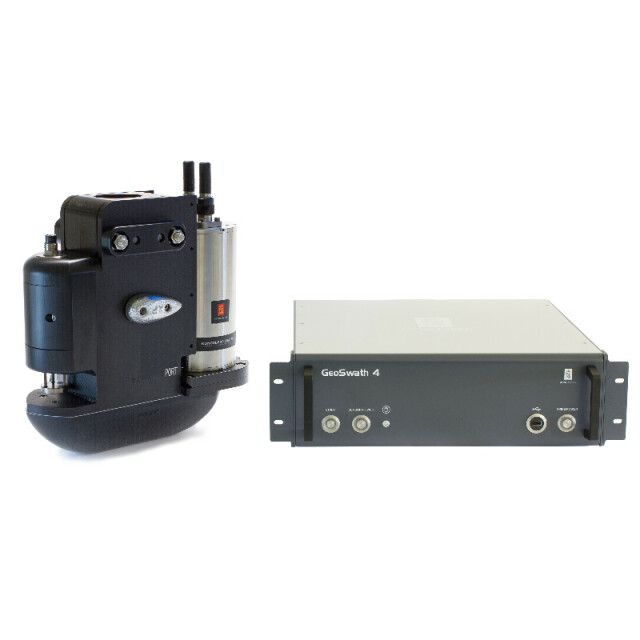
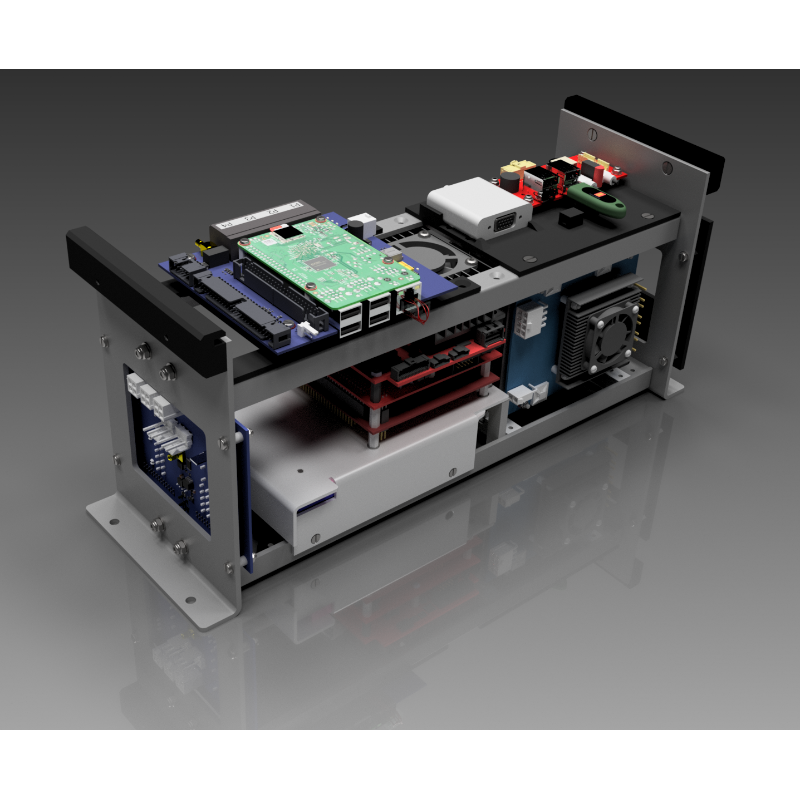
The GeoSwath 4 turn-key solution comprises a compact dual transducer head as standard with versatile mounting options. The newly developed deck unit contains the complete sonar electronics together with a high spec PC, running the new GS4 software. This provides full acquisition, calibration and data processing capabilities for producing the final bathymetry map and side scan mosaic. All customary ancillary sensors can be directly interfaced.
Dual sonar head
The transducers are available in a choice of three frequencies: 125, 250, 500 kHz, varying in depth performance and data resolution depending on the survey task. A wide range of motion reference units (MRU) and sound velocity sensors (SVS) can be mounted on the compact head. This has been designed for easy deployment on a supplied pole for over-the side or bow-mount options. Alternatively the transducers can be deployed on bespoke boat hull installations. as well as USV assemblies.
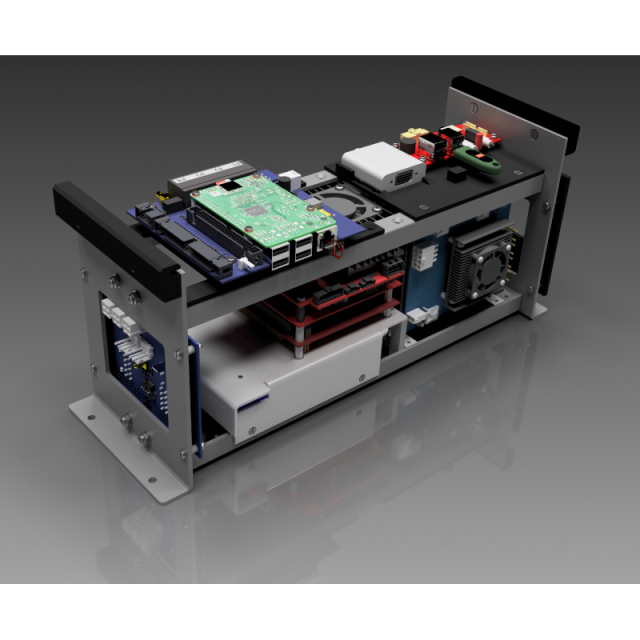
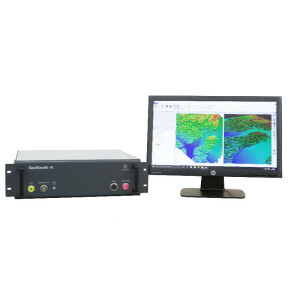
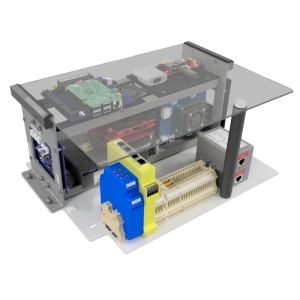
Deck Unit
The workstation contains the complete system electronics. It has been newly designed for increased performance in a more compact housing. It offers twice the data density compared to its previous versions and increased nadir performance. All peripheral sensors (position, motion, heading, transducer face sound velocity, sound velocity profiler and tide) are interfaced directly.
GS4 Software
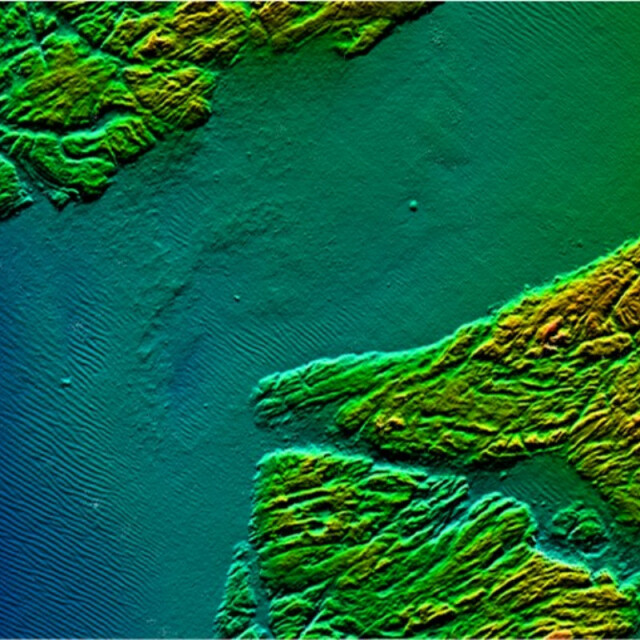
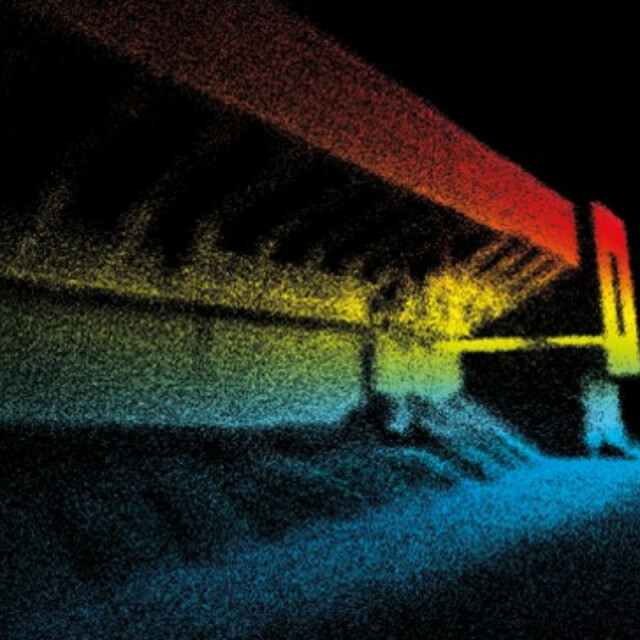
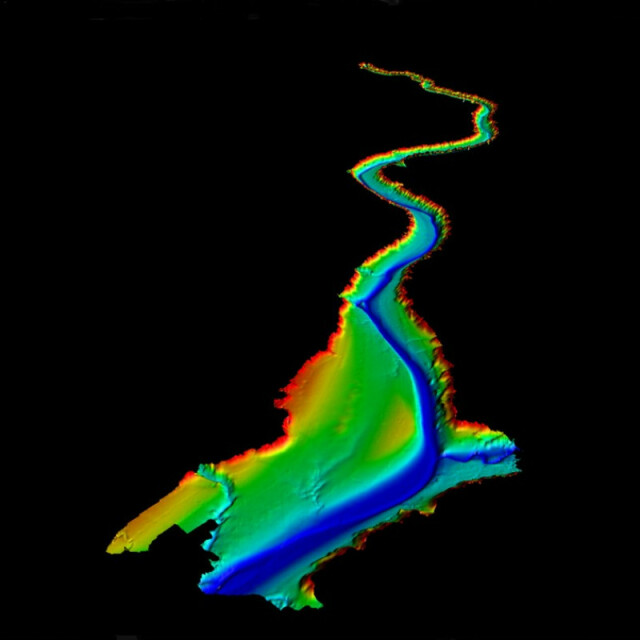
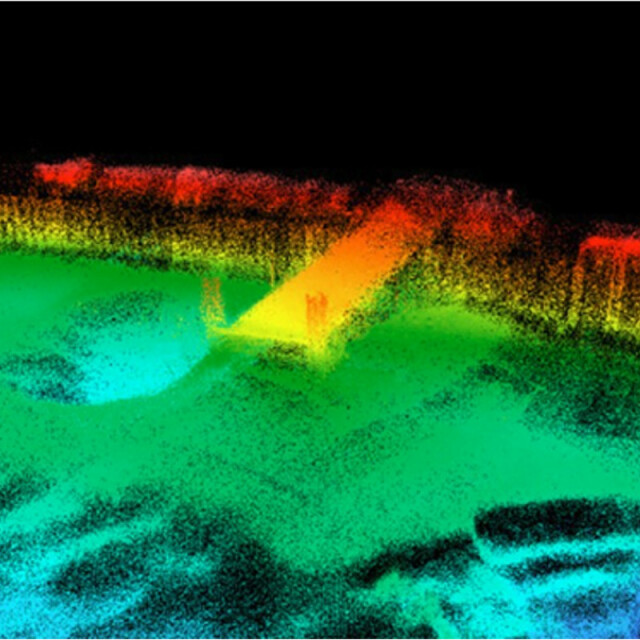
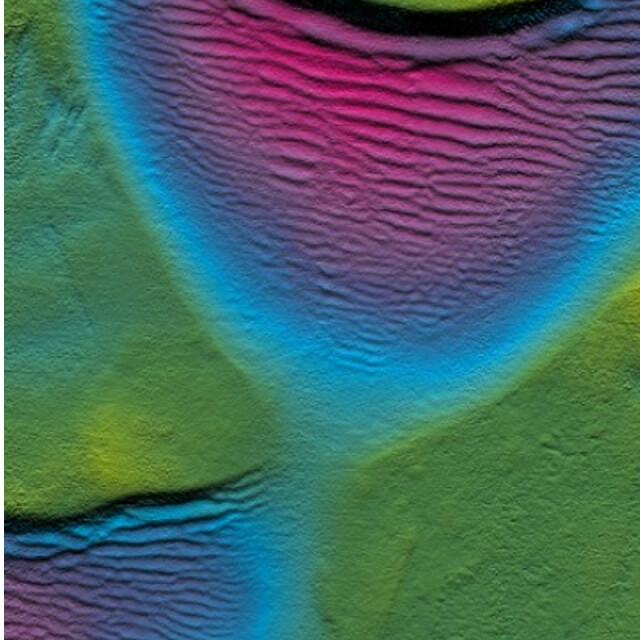
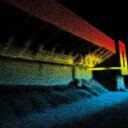
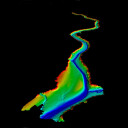
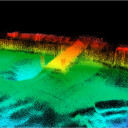
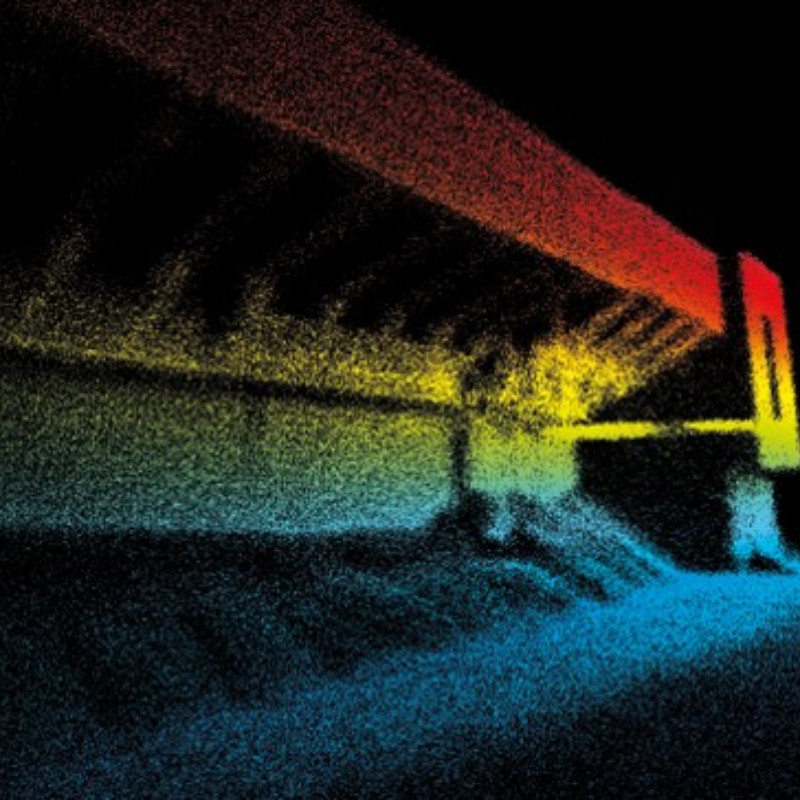
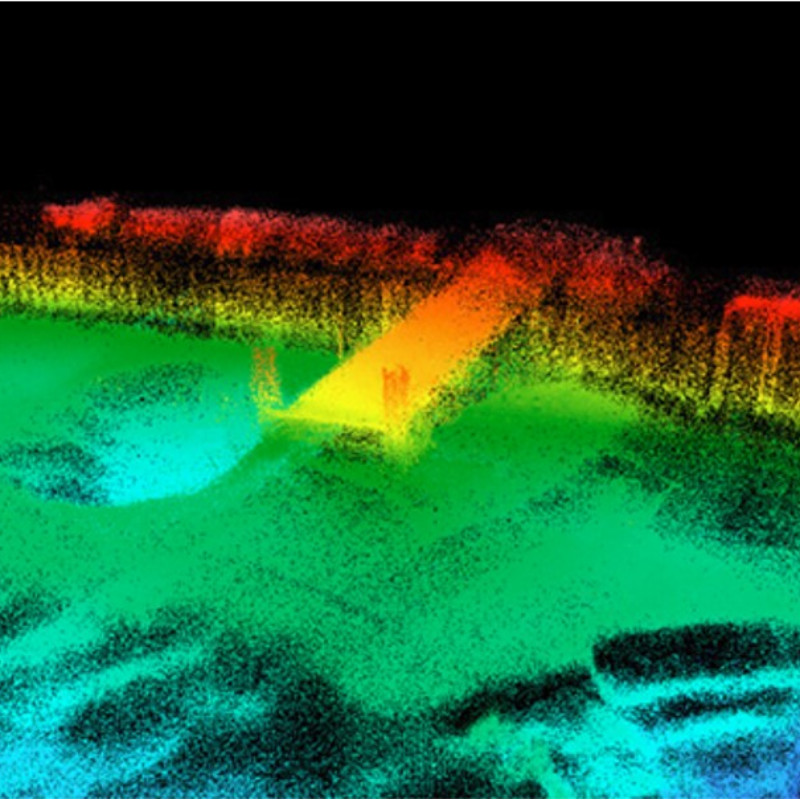
The GS4 software has been specifically designed for the new GeoSwath 4. It is included with the system and provides a complete project based solution; acquisition, storing and editing of sonar and ancillary data, grid-based patch test calibration, data processing, advanced bathymetry data gridding, side scan mosaicing and 3D data visualisation. Newly developed filter algorithms provide real time processed data with minimum user intervention even in difficult survey situations involving vertical structures, shipwrecks and steep seabed slopes.
***News Flash***
GS4 software v1.0.25 is ready for general release soon
The update introduces a new Artificial Intelligence-powered data processing for GeoSwath users, which has already been trialed by selected end-users globally.
The system improves in-survey operational agility and decision support by providing a high-quality real-time data stream on board while cutting the time to final product in post-processing.
Other new functionality with this update includes Survey Accuracy verification, and an Auto mode for side scan data processing. A full change log is available on request.
The GS4 v1.0.25 software update is available free of charge1 via micro-SD card for customers already using GS4 v1.0.24.
Contact your local dealer or email [email protected] for more information.
1Cost of physical media, logistics and support may be applicable.
Do you have questions about this product?
- Questions about price, availability, and/or retailers
- Questions about technical specifications and usage
- Questions about suitability for your project or application
Specifications
-
Physical properties of transducer head
-
Length [m]
0.33
Width [m]
0.109
Height [m]
0.75
Min. external power [V]
110
Max. external power [V]
240
Max. power consumption [W]
250
Transducer Head Weight, appr. including peripherals
16.8 kg
-
Speed of sound
-
Real-time correction of refraction at transducer head
Y
Real-time integration of SV-profile
N
Explanation of SV-profile application process
SVP can be imported as file and applied
-
Interfaces
-
Compatible software
All standard processing packages including QPS Qinsy and Hypack (real time) and Caris HIPS and SIPS; IVS3D Fledermaus
Compatible hardware
Any standard
Real-time access procedure
Data broadcast via Ethernet or file export
-
Motion compensation
-
Motion sensors compatible to the system
All standard
Required pitch uncertainty [deg]
0.03
Required roll uncertainty [deg]
0.03
Required heave uncertainty [m]
0.05
Motion stabilized
Y
-
Mounting and deployment
-
Mounting
Hull mounted & Portable
Retractable
N
-
Used Sonar Methods
-
Type of system
Phase Measuring Bathymetric Sonar
Sonar type
Interferometric
-
System Parameters
-
Min. frequency [kHz]
500
Max. frequency [kHz]
500
Min. depth [m]
0
Max. depth [m]
200
Depth resolution [mm]
1.5
Max. swath as a function of depth
12
Ping frequency [Hz]
30
Min. beam width across track [deg]
0.5
max Swath Update Rate
30 per second (simultaneous port and starboard)
Pulse length
User selectable
Available frequenties
125 kHz, 250 kHz, 500 kHz
Simultaneous multiple frequencies
No
Max. pings / second
30
High resolution mode
Yes
Number of beams
2
Min. beam width along track [deg]
0.5
-
Bottom Coverage
-
Max. swath width [m]
190
Equal footprint spacing
Y
Equi-angular/equi-distant mode
Equi-angular, Equi-distant
Backscatter
Y
Water column
Y
-
Uncertainty
-
Intended S44 order
Special
-
More information
-
Distinguishable features
Co-registered side scan as well as bathymetry. Wide 240 degree beam angle.
-
General
-
Date of first release
2016
Documents
Other documents
-
GeoSwath 4 2024.pdf6.72 MB





{kind=link}