
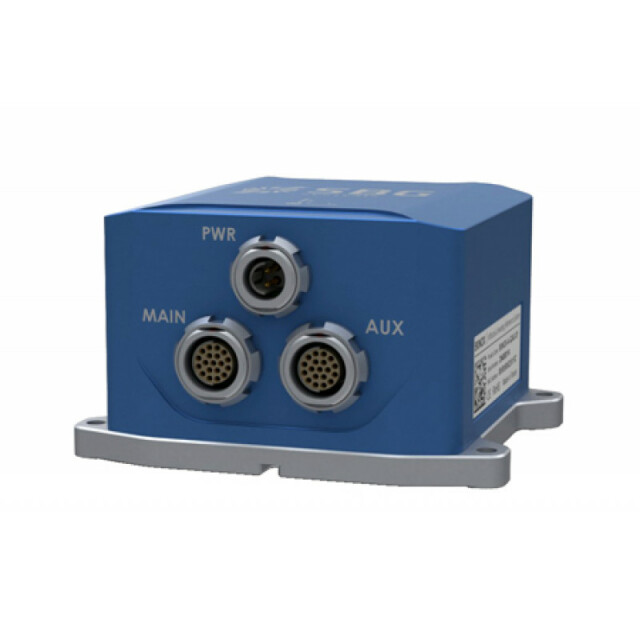
Ekinox-A
Motion & Heave AHRS/MRU
Ekinox-A is an advanced Attitude & Heading Reference System (AHRS) or MRU (Motion Reference Unit). It combines high end gyroscopes and accelerometers, and runs an enhanced Extended Kalman Filter (EKF) to provide Roll, Pitch, Heave, and Heading when connected to an external GNSS receiver.

SBG Systems
Carrières-sur-Seine, FR
Description
Ekinox-A is an ITAR Free Attitude & Heading Reference System (AHRS) or MRU (Motion Reference Unit). It combines high end gyroscopes, accelerometers, magnetometers, and runs an enhanced Extended Kalman Filter (EKF) to provide Roll, Pitch, Heading, and Heave.
Do you have questions about this product?
- Questions about price, availability, and/or retailers
- Questions about technical specifications and usage
- Questions about suitability for your project or application
Specifications
-
Other specifications
-
Graphical user interface
Y
Typical application
Ekinox-A can be used as AHRS, Vertical Gyro, MRU, IMU for Ship Motion Monitoring, Buoy & ROV orientation, and embedded imagery system orientation and stabilization such as Sonar, LiDAR, Camera, Antenna, etc.
Distinguishable features
Ekinox-A delivers real-time auto adjusting heave on 4 monitoring points, handles magnetic disturbances, and provides NMEA outputs. This motion sensor computes an enhanced heave based on position and speed computation, and robust heading even during turns thanks to Single or Dual Antenna GPS inputs. With a low latency (<3 ms), a high output rate (200Hz), and a very low noise on Euler Angles (<0.03°), the Ekinox-A is a cost-effective alternative solution for mobile equipment orientation & stabilization.
Export restrictions
No
-
Environmental
-
Non-operating shock tolerance [g]
500
Operating shock tolerance [g]
3
Max. rotation speed [deg/s]
300
Min. operating temperature [°C]
-40
Max. operating temperature [°C]
75
-
Software
-
Name
sbgCenter
Filtering
Y
Adaptable input signals
Y
Integrity monitoring of position input
Y
Uncertainty indicators given in output
Standard Deviation + Status Flags
Uncertainty of time stamp for output [ms]
0.0001
-
GNSS aided uncertainty
-
Heading [deg]
0.05
Pitch [deg]
0.02
Roll [deg]
0.02
Heave: constant part [m]
0.05
Heave: variable part [%]
5
-
General
-
Year of initial development
2012
Height [m]
0.058
Width [m]
0.086
Length [m]
0.1
Weight [kg]
0.4
Min. Voltage (DC)
9
Max. Voltage (DC)
36
Power consumption [W]
3
Splashproof casting
Y
Water resistant casting
N
Mean time between failures [hr]
50000
Type of accelerometer
MEMS
Type of gyro
MEMS
Type of application
Air, Land, Marine
Height [mm]
58
Width [mm]
86
Length [mm]
100
-
GNSS Positioning Sensor
-
RTK Network Compatibility
Y
-
Unaided uncertainty
-
Pitch [deg]
0.02
Roll [deg]
0.02
Heave [m]
0.05
-
Data formats
-
NMEA formats
GGA, RMC, HDT, ZDA
RTCM
Y
Other
TSS1
-
Inertial Measurement Unit
-
Accelerometer bias [µ-g]
2
gyro bias [deg/hr]
0.5
Calibration procedure
Dynamic calibration from -40 to 75°
Documents
Brochure
migrationaevivg.pdf
764.96 KB
Other documents
-
Ekinox A Test Results1.06 MB










{kind=link}