

EM 124
MULTIBEAM ECHO SOUNDER
The modular, state-of-the-art EM 124 performs accurate, high resolution seabed mapping up to full ocean depths. The successor of the EM 122, the EM 124's broad range of functionality supports simultaneous collection of multiple data types, saving time in the planning, execution and analysis phase. A low noise echo sounder, EM 124 with full ocean depth capability delivers superior data requiring minimal post-processing.

Kongsberg Discovery
Horten, NO
Description
FEATURES:
• High resolution
• Wide frequency range
• CW and FM chirp
• Roll, pitch and yaw stabilisation in realtime
• Nearfield focusing - both on transmit and receive
• Short pulse lengths and large bandwidth
• Seabed image as standard
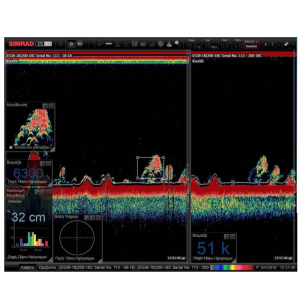
• Water column display and logging
• Single or Dual swath for increased density or for increased survey speed
• Extra detections
• Mammal protection
• Hull unit
• Ice window for polar activities
Do you have questions about this product?
- Questions about price, availability, and/or retailers
- Questions about technical specifications and usage
- Questions about suitability for your project or application
Specifications
-
Physical properties of transducer head
-
Length [m]
7.77
Width [m]
0.78
Height [m]
0.25
Min. external power [V]
115
Max. external power [V]
230
-
Speed of sound
-
Real-time correction of refraction at transducer head
Y
Real-time integration of SV-profile
Y
Explanation of SV-profile application process
Calculation of each sounding is according to Schnells law of refraction, in real time
-
Maintenance criteria
-
Mean time before failure [hr]
2000
Mean time to repair [hr]
1
-
Interfaces
-
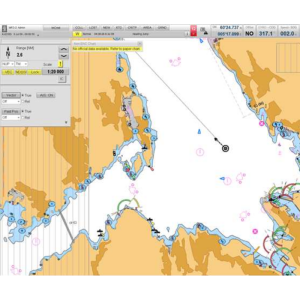
Compatible software
SIS, Qinsy, HYPACK, EIVA, Fledermaus, CARIS and others.
Compatible hardware
Sound velocity at transducer; Sound Velocity profile; Position; Heading; 1PPS; Single beam echo sounder (optional)
Real-time access procedure
Realtime visualization of bathymetric data; both raw data and gridded data in 2D and 3D; swath; quality of each beam; water column; seabed image; attitude data; 3D waterfall
-
Motion compensation
-
Motion sensors compatible to the system
Seatex MRU 5; Seapath 130/380; Applanix POS/MV; and other sensors with comparable accuracy
Required pitch uncertainty [deg]
0.02
Required roll uncertainty [deg]
0.02
Required heave uncertainty [m]
0.05
-
Mounting and deployment
-
Mounting
Hull mounted
Retractable
N
-
Used Sonar Methods
-
Type of system
Multibeam
Bottom Detection Method
Amplitude or phase
-
System Parameters
-
Min. frequency [kHz]
10.5
Max. frequency [kHz]
13.5
Min. depth [m]
20
Max. depth [m]
11000
Depth resolution [mm]
10
Max. swath as a function of depth
6
Max. pings / second
1600
Ping frequency [Hz]
5
Min. beam width across track [deg]
0.5
Min. beam width along track [deg]
1
-
Bottom Coverage
-
Footprint in nadir direction [m]
0.87
Footprint at max. horizontal range [m]
2.82
Smallest identifiable cube [m3]
2
Max. swath width [m]
40000
Equal footprint spacing
Y
Max. number of points per ping for side scan operation
100000
-
Uncertainty
-
Intended S44 order
2
Max. survey speed for specified RMS [kt]
16
-
More information
-
Distinguishable features
High resolution soundings with extremely wide swath up to full ocean depths
-
General
-
Date of first release
2019
Documents
Brochure
?OpenDocument=








{kind=link}