
Phins Subsea
FOG-based high-performance subsea inertial navigation system for deep water
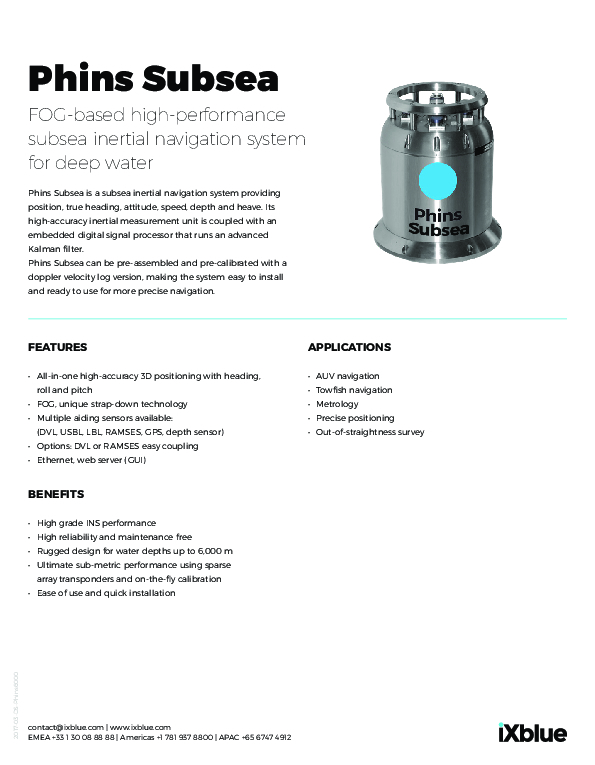
Phins Subsea is a subsea inertial navigation system providing position, true heading, attitude, speed, depth and heave. Its high-accuracy inertial measurement unit is coupled with an embedded digital signal processor that runs an advanced Kalman filter. Phins Subsea can be pre-assembled and precalibrated with a doppler velocity log sensor, making the system easy to install and ready to use for more precise navigation.

Exail
Saint Germain en Laye, FR
Description
Phins Subsea is a subsea inertial navigation system providing position, true heading, attitude, speed, depth and heave. Its high-accuracy inertial measurement unit is coupled with an embedded digital signal processor that runs an advanced Kalman filter.
Features
- All-in-one high-accuracy 3D positioning with heading, roll and pitch.
- FOG, unique strap-down technology.
- Multiple aiding sensors available: DVL, USBL, LBL, RAMSES, GPS, pressure sensor.
- Multi DVL Tightly coupled solutions.
- Ethernet, web server (GUI)
Benefits
- High grade INS performance.
- High reliability and maintenance free.
- Rugged design for water depths up to 6,000 m.
- Ultimate sub-metric performance using sparse array transponders and on-the-fly calibration.
- Ease of use and quick installation
Applications
- Various subsea vehicle such as AUV, ROV, Towfish & ROTV.
- Subsea metrology.
- Subsea construction support.
- Out of straightness.
Do you have questions about this product?
- Questions about price, availability, and/or retailers
- Questions about technical specifications and usage
- Questions about suitability for your project or application
Specifications
-
Other specifications
-
Typical application
ROV and AUV navigation - Towfish navigation - Metrology - Precise positioning - Out-of-straightness survey
Distinguishable features
- Accurate and georeferenced position + attitude at high frequenvy- No spinning element hence maintenance free- Flexible & scalable configuration for all deployment scenarios- Immediate availability and performance for all vehicles- Corrosion-free housing for water depth up to 6,000 m- Ultimate sub-metric performance using sparse array transponders and on-the-fly calibration
-
Environmental
-
Max. rotation speed [deg/s]
750
Min. operating temperature [°C]
-20
Max. operating temperature [°C]
55
-
Software
-
Integrity monitoring of position input
Y
Integrity monitoring of log input
Y
Maximum latency of position input [ms]
10
Maximum latency of log input [ms]
100
-
Doppler log aided uncertainty
-
Pitch [deg]
0.02
Roll [deg]
0.02
Surge/sway [m]
0.025
Decrease in position accuracy [m/hr]
0.05
-
GNSS aided uncertainty
-
Heading [deg]
0.025
Heave: constant part [m]
0.05
Heave: variable part [%]
5
Increase in position uncertainty w.r.t. stand-alone GPS [m]
0.8
-
General
-
Year of initial development
2004
Height [m]
0.288
Width [m]
0.255
Length [m]
0.255
Weight [kg]
13
Min. Voltage (DC)
20
Max. Voltage (DC)
32
Power consumption [W]
15
Splashproof casting
Y
Water resistant casting
Y
Water resistance [m]
6000
Mean time between failures [hr]
100
Type of accelerometer
Pendulum
Type of gyro
Fiber Optic Gyroscope
Removable from base plate
Y
Type of application
Marine
Moving parts
N
-
GNSS Positioning Sensor
-
Number of integrated GNSS receivers and antenna ports
0
-
Unaided uncertainty
-
Pitch [deg]
0.05
Roll [deg]
0.05
Heave [m]
0.01
Surge/sway [m]
0.025
Decrease in position accuracy [m/hr]
0.03
-
Data formats
-
RTCM
Y
Other
ASCII; BINARY; IXBLUE STD BIN & more than 130 output protocols
NMEA formats
Any
-
Inertial Measurement Unit
-
gyro bias [deg/hr]
500
Calibration procedure
Factory calibration
Documents
Brochure
phinssubsea-datasheet.pdf
167.06 KB











{kind=link}