




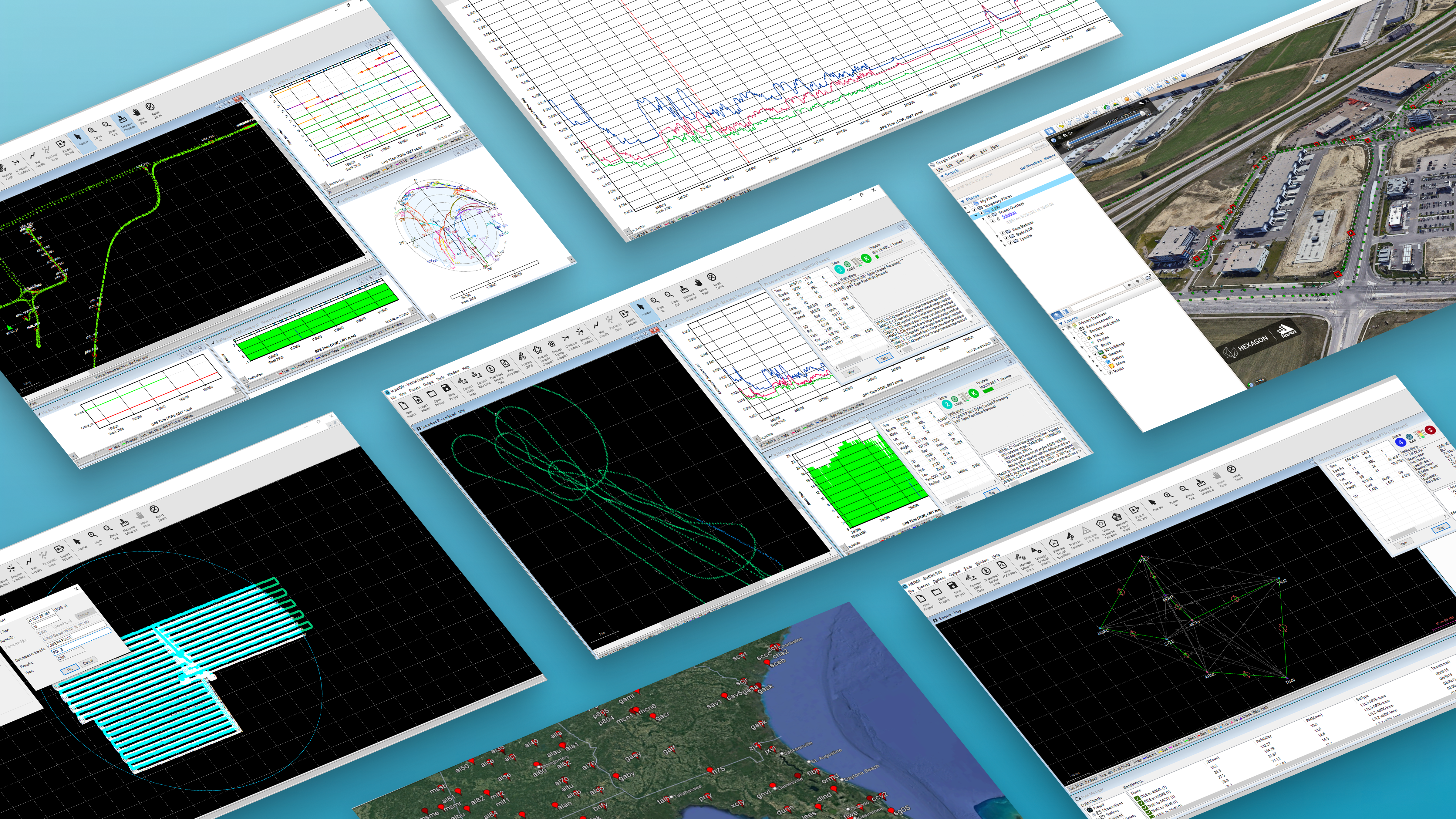

Waypoint GNSS/INS Post-Processing Software
Waypoint software is an industry-leading, professional post-processing portfolio trusted by the companies building maps for the world.
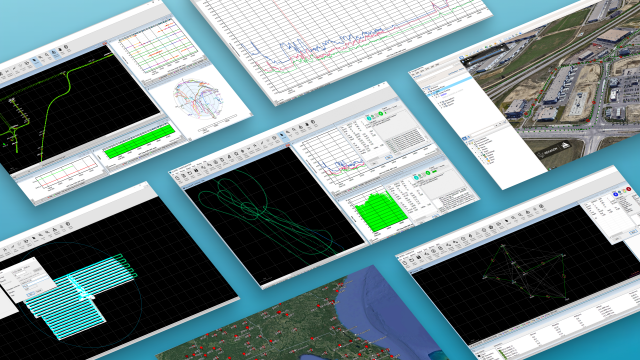
Post-processing maximizes the accuracy of the solution by processing previously stored Global Navigation Satellite System (GNSS) and Inertial Measurement Unit (IMU) data forward and reverse in time, and combining the results. The position, velocity and attitude solution can be smoothed and output at the required data rate and in the coordinate frame required. This process also provides the ability to assess the solution reliability and accuracy.

NovAtel
Calgary, CA
Description
The GrafNav and Inertial Explorer software packages are available as digitally secured machine-portable licenses. The products are also available as a perpetual license or as a time-limited term license. A Software Development Kit (SDK) is available to allow developers to customize the entire processing workflow to suit their customers or application.
Inertial Explorer
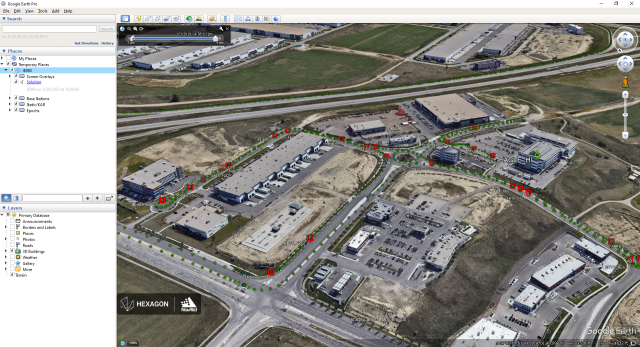
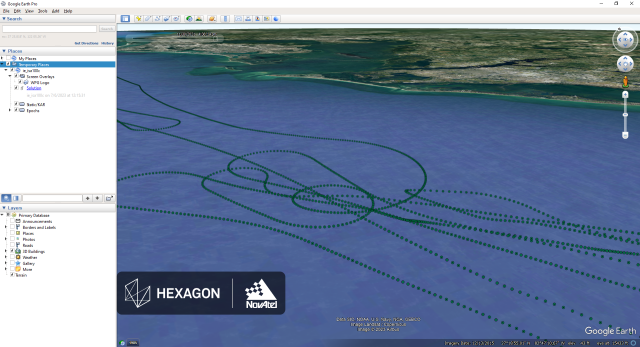
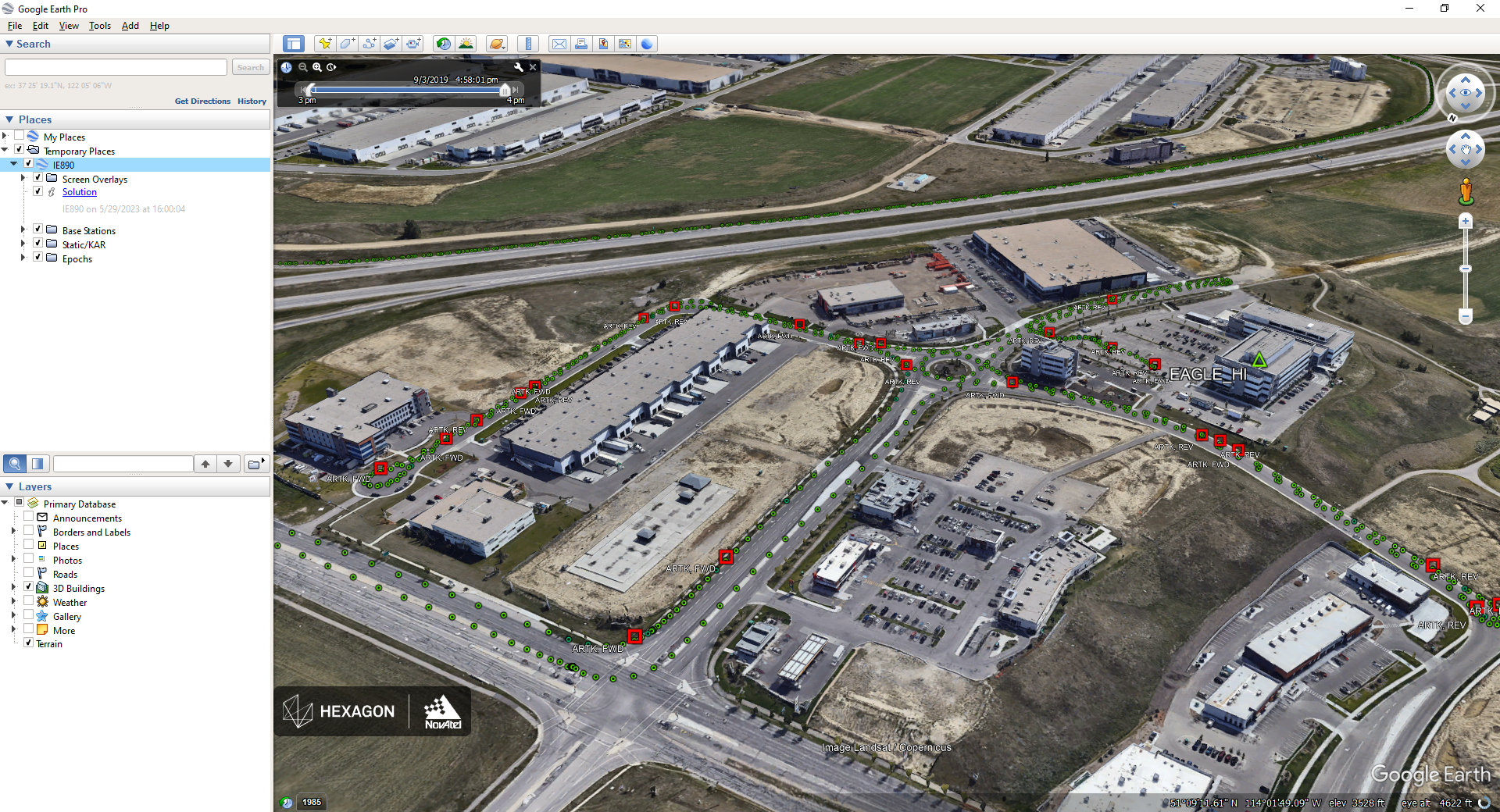
Inertial Explorer (IE) maximizes the performance of your GNSS/INS hardware by ensuring you get the position, velocity and attitude accuracy your application requires. The tightly coupled integration of GNSS and IMU data delivers precise results, even when lower-grade inertial sensors are used. IE can produce results suitable for demanding applications such as mobile mapping, and aerial and hydrographic surveying. IMU data from high-end Fibre Optic Gyro (FOG) or Ring Laser Gyro (RLG) IMUs, and from lower-grade sensor technology such as Micro Electrical Mechanical Systems (MEMS) can be processed.
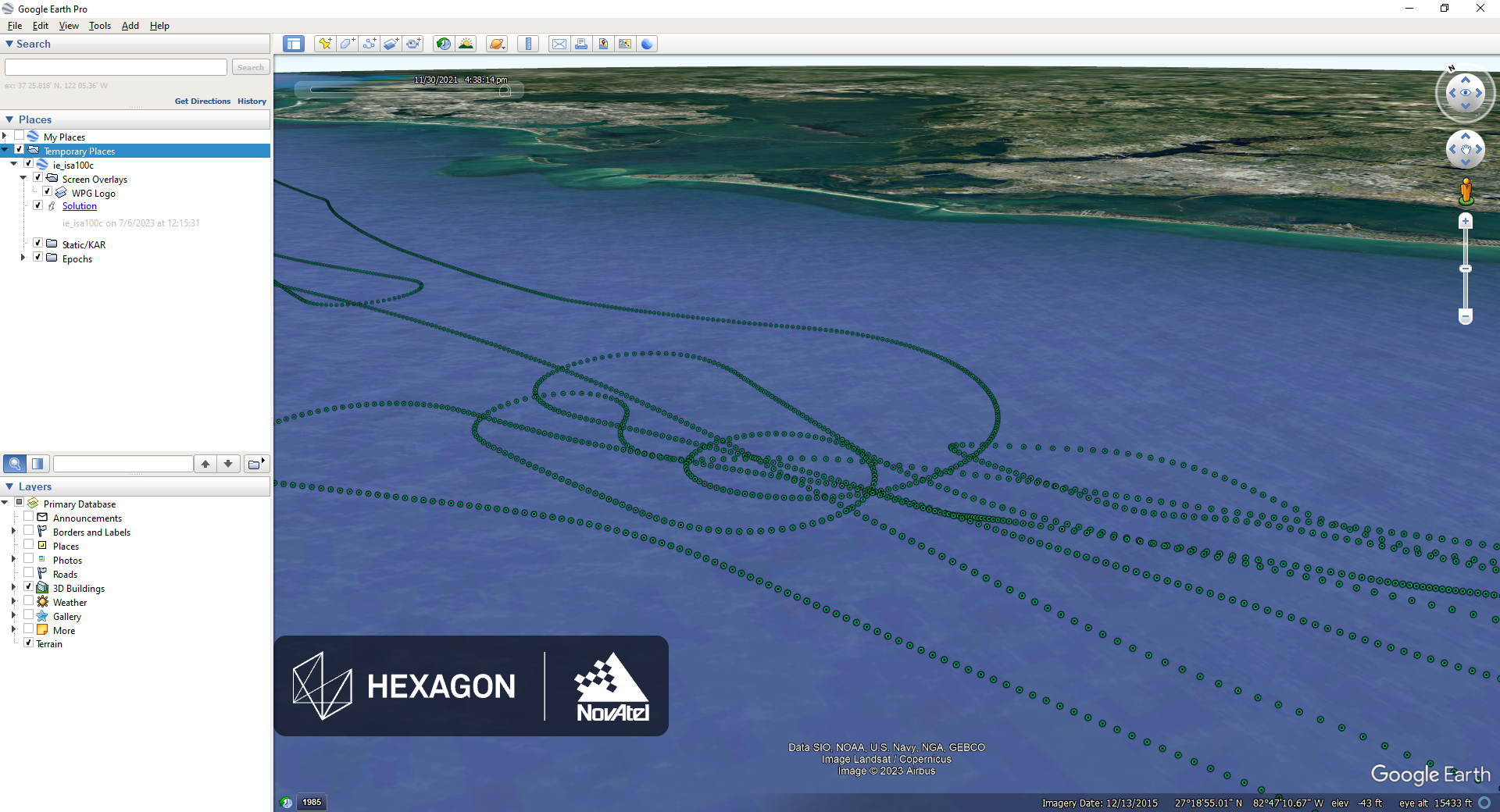
Inertial Explorer Xpress
Inertial Explorer Xpress provides the same core processing and utilities as Inertial Explorer along with simplified functions and workflows that have been tailored for UAV markets and small project areas. Data can be post-processed efficiently without compromising position, velocity or attitude accuracy. Inertial Explorer Xpress produces centimetre-level position and attitude solutions compatible with LiDAR, camera and other sensor data.
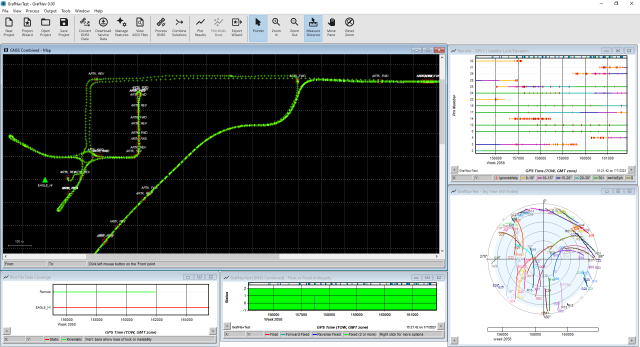
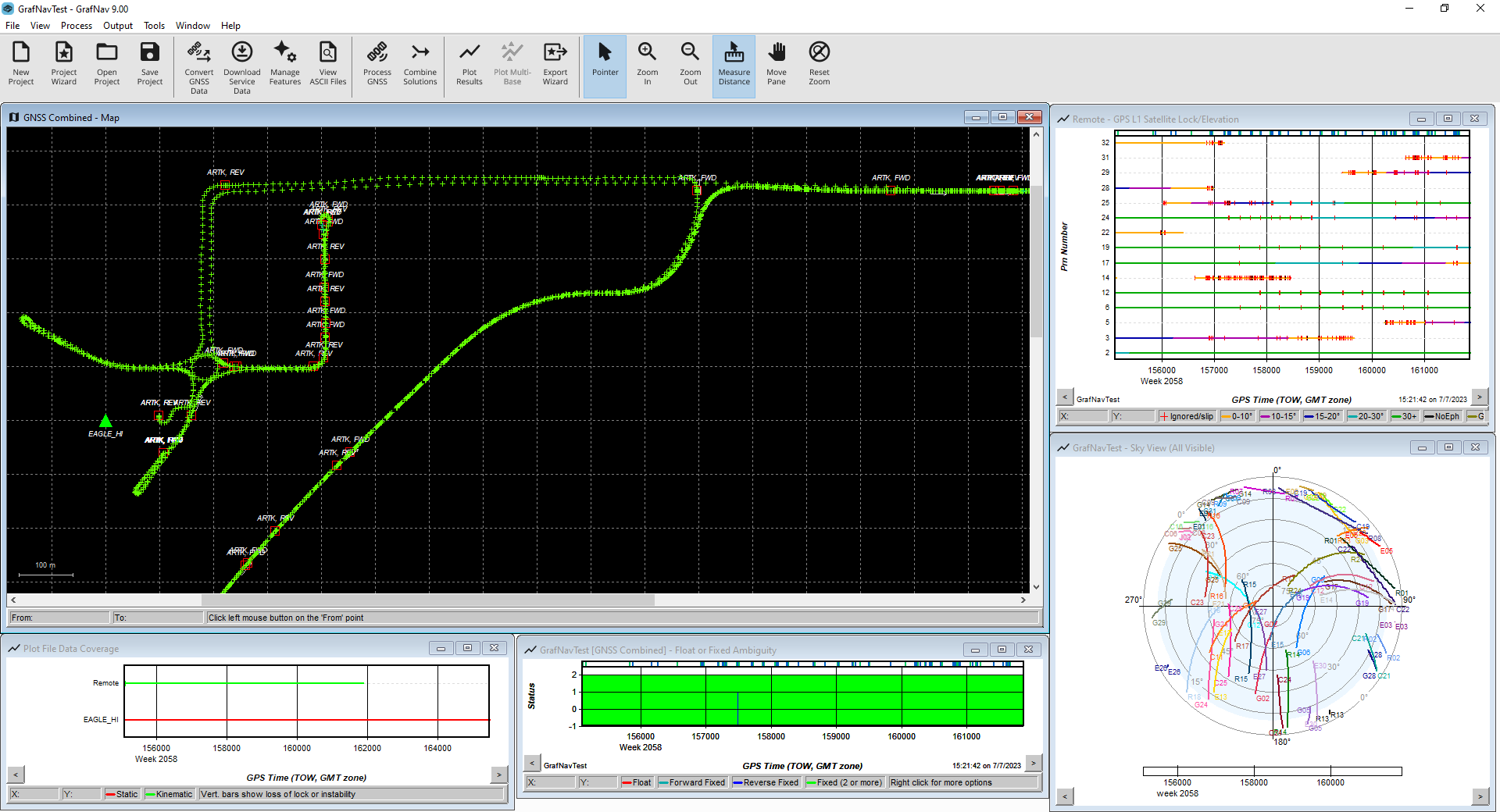
GrafNav
GrafNav post-processing software is a powerful, highly configurable processing engine that allows for the best possible static or kinematic GNSS accuracy using all available GNSS data. Support of data formats from most single and multi-frequency commercial receivers means GrafNav will likely work with your existing hardware. A full suite of data and solution visualization and diagnostic tools is available for quality assurance. Precise satellite clock and orbit data can be downloaded from within GrafNav to achieve sub-5 cm position accuracy using PPP with kinematic trajectories.
GrafNav Static
GrafNav Static is a batch static processing package and network. Within minutes, GrafNav Static processes an entire network in a single operation. When the processing is completed, GrafNav Static colour codes the baselines to ensure any problematic vectors are readily distinguished.
Do you have questions about this product?
- Questions about price, availability, and/or retailers
- Questions about technical specifications and usage
- Questions about suitability for your project or application
Specifications
-
Options
-
INS Integration
Y
Offline operability
Y
-
General
-
Area of application
Marine, Airborne, Land
Processing type
Post-processing
Compatible Receivers
All GNSS receivers
Year of introduction
2005
-
Requirements
-
Operating System
Windows, Linux
-
Corrections base
-
Signal
Satellite, Cellular, IP, Radio
DGNSS
Y
RTK Corrections Via NTRIP Network
Y
SBAS
Y
-
Technical specifications
-
Coverage
Global
-
Miscellaneous
-
Subscription
Global, Local
Subscription plans
<1 year or annual subscriptions
Documents
Brochure
00191579637d5b7ede95d?authid=4AxY37U3TTL8&utm_source=geo-matching&utm_medium=web&utm_campaign=Global_CA_Geomares(geo-matching.com)








{kind=link}