




GNSS Receiver for NASA's MARS Unmanned Robotic Vehicle
NASA's Mars Exploration Program is a long-term robotic exploration effort seeking to assess the habitability of the red planet. The goal was to develop an unmanned robotic vehicle capable of collecting information that would help determine whether Mars ever had an environment able to support small life forms called microbes. From its early days, contributors to the Mars rover missions have utilized NovAtel GNSS receivers and antennas in their project work and testing applications.
Ames Research Center at Moffett Field, California has played a critical role in NASA missions in support of America's space and aeronautics programs. In 2002/2003 the initial prototyping for the first Mars rover was completed at Ames with NovAtel's DL-4 GPS receiver, and later replaced with the DL-V3.
NASA Ames conducted testing at Devon Island, Nunavut, Canada, as it has similar desolate terrain to that Mars, (see Figure 1 and Figure 2).
Figure 1: Darlene Lim (NASA Ames Research Center) samples water from a lake on Devon Island
Photo Credit: NASA Ames Research Center
NovAtel GNSS Antennas for the MARS rover
In 2007, two prototype Mars rovers, K-10 Black and K-10 Red, used NovAtel's 700-series antennas to explore the island's surface. K-10 Black, (see Banner image above) detects different layers below the surface with ground-penetrating radar or radio waves in a grid-like survey. K-10 Red, (see Figure 2) creates 3-dimensional (3-D) maps of the terrain over the ground with Laser Radar (LADAR) and works autonomously. During this two-week field test, the K-10 rovers drove more than 30 kilometres and collected more than 25 gigabytes of survey data.
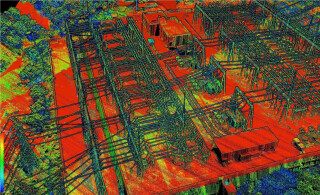
Figure 2: K-10 Red rover uses its 3-D scanning systems during field tests in the “frost rubble zone” of Earth
Photo Credit: NASA Ames Research Center
The Jet Propulsion Laboratory (JPL) in Pasadena, California also led much of the Mars project work and utilized NovAtel GNSS equipment.
Johns Hopkins University (JHU), from their facility in Virginia, was involved in the design, manufacture and control of the Mars mission (see figure 3). Their project utilized NovAtel's SPAN® GNSS/INS technology for the landing craft.
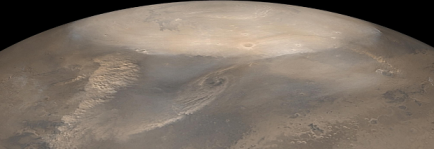
Figure 3: The choppy dust clouds of at least three dust storms are visible in this mosaic of images taken by the Mars Global Surveyor spacecraft in 2002
Image Credit: NASA/JPL/Malin Space Science Systems
NASA's Mars rover Curiosity landed on Red Planet on August 6, 2012. For the most current information about the project, go to:
http://www.nasa.gov/mission_pages/msl/index.html
Information about the mission and the robotics industry is also discussed at the following link:
http://www.popsci.com/technology/article/2012-08/curiositys-legacy-what-sundays-successful-landing-means-future-robotic-space-exploration
Do you have questions about this case study?
Get in touch with NovAtel, and they would be happy to answer any questions you have about pricing, suitability, availability, specs, etc.




![3月21日-封面[1].jpg](https://cdn.geo-matching.com/voeE1ywo.jpg?w=320&s=6b3b1a0215d770f8797653e9202a8f52)





{kind=link}