


CEE USV Coastal Lagoon Survey with Robotic Navigation
The CEE-USV offers a simplified approach to unmanned single beam hydrographic surveying. The challenge for the addition of automation is avoiding complexity and worsening the usability of the system. The CEE-PILOT meets this challenge while at the same time presents the opportunity for exceptional results. In this coastal lagoon survey, the Hydromagic dataset shows the consistency in data afforded by robotic navigation. The 6m (20ft) spaced line plan was followed with extremely low XTE – even when tidal currents were present.
Using an unmanned boat such as the CEE-USV for hydrographic surveys offers significant safety advantages and potential time and manpower savings versus a manned boat. While this is not always the case, and USVs should be used only for appropriate survey sites, when a USV is suited to the task the benefits can be significant. After selecting a USV for the survey, the next choice is whether to simply rely on manual operation from the shore or use an autopilot to manage the survey. The CEE-PILOT™ robotic navigation controller blends CEE’s trademark simplified operation with the advanced Dynautics Ltd SPECTRE™ autopilot. This leads to an exceptionally capable navigation package with little added complexity over the manually operated system. The exceptional line-following ability of the CEE-USV when controlled by the CEE-PILOT system is shown here using survey data from an approx’ 300 x 250m lagoon (1000 x 800ft), and the benefits in data quality and consistency are clear.

CEE-USV™ under SPECTRE™ autopilot control.
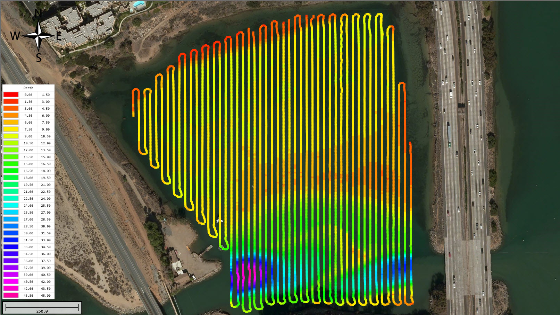
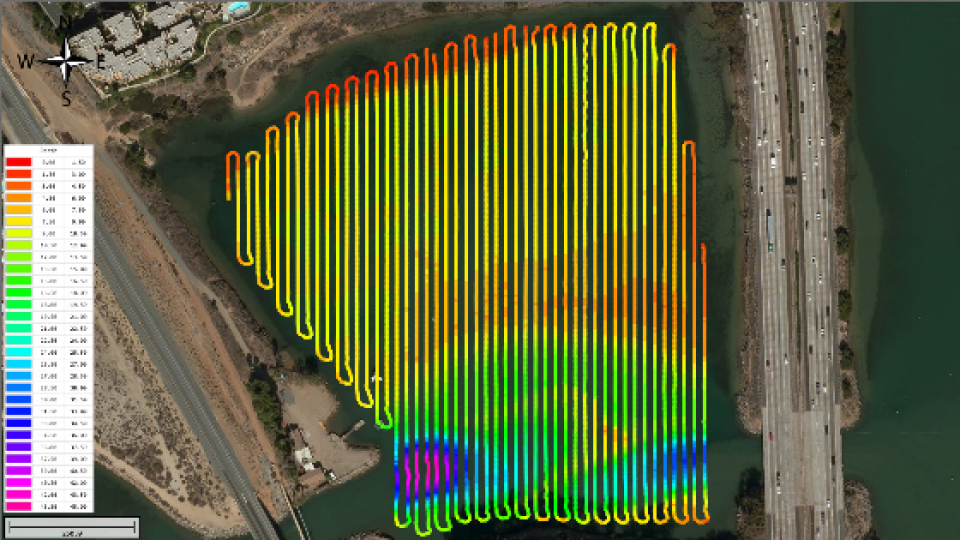
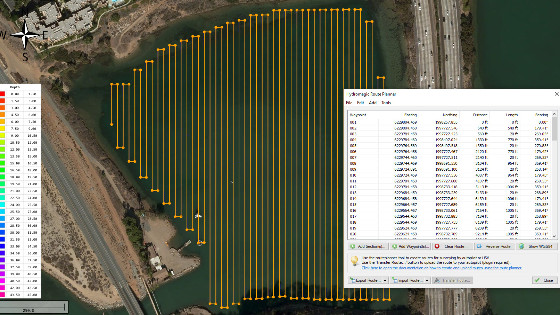
Completed CEE-PILOT™ Survey Lines in Hydromagic
Simple Hydromagic User Interface
The CEE-USV offers real time telemetry to a shore PC with over 1000m (3300ft) range. There is no requirement for a PC on the vehicle, and the operator can simply drive the boat while looking at the shore display. With the CEE-PILOT installed, the boat navigtion control can be switched from manual to track-following autopilot mode by a single toggle switch on the RC transmitter. As soon as the robotic mode is selected, the USV will head to the first waypoint in its route plan and start surveying.
In order to survey the route, the line plan is first constructed in Eye4Software Hydromagic. This may be done in the field, for example after manually driving the CEE-USV to mark the perimeter. Thus, there is no specific requirement for a pre-defined route plan before starting the job.

Survey boundary from USV tracing the perimeter.
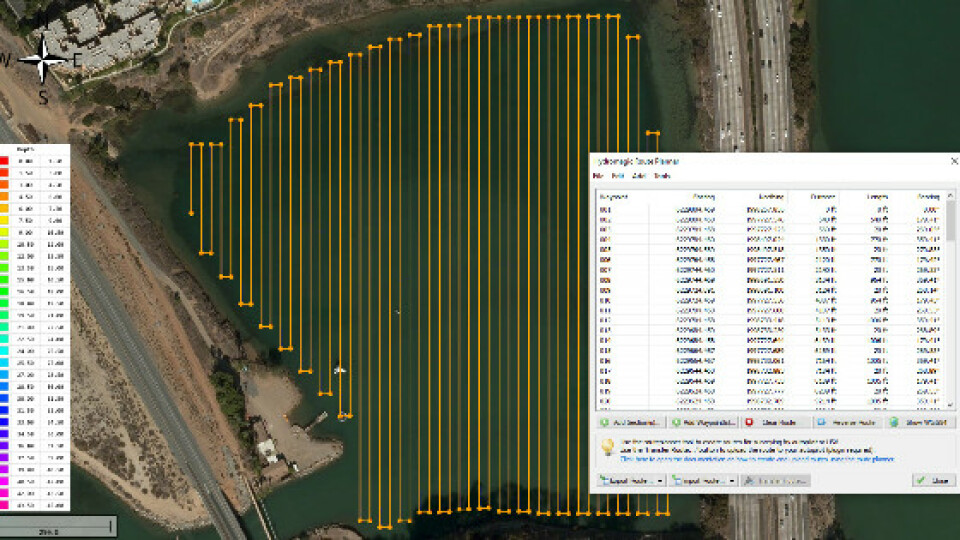
Once the boundary is ready, the route lines are automatically generated with the desired azumith and spacing. Then all or a subset of the lines may be selected for transfer to the autopilot. The integrated Hydromagic SPECTRE device plugin transfers the route waypoints to the autopilot over the data telemetry link. After a few seconds, the route acceptance is confirmed and the CEE-USV is ready to start surveying when commanded.
Entire lagoon route plan shown on Hydromagic.
Autopilot Performance
For the lagoon survey, much of the area was calm with light winds and no current. This allowed the USV to follow the 20ft spaced line plan with remarkable precision. The typical cross track error achieved when on line was under 15cm (6”) making it largely impossible to see the track lines behind the sounding data!
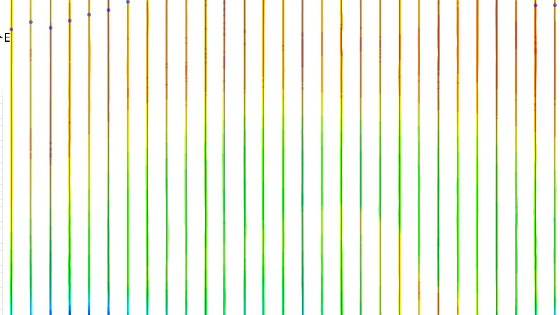
Soundings spaced at 20ft overlaid on survey lines.
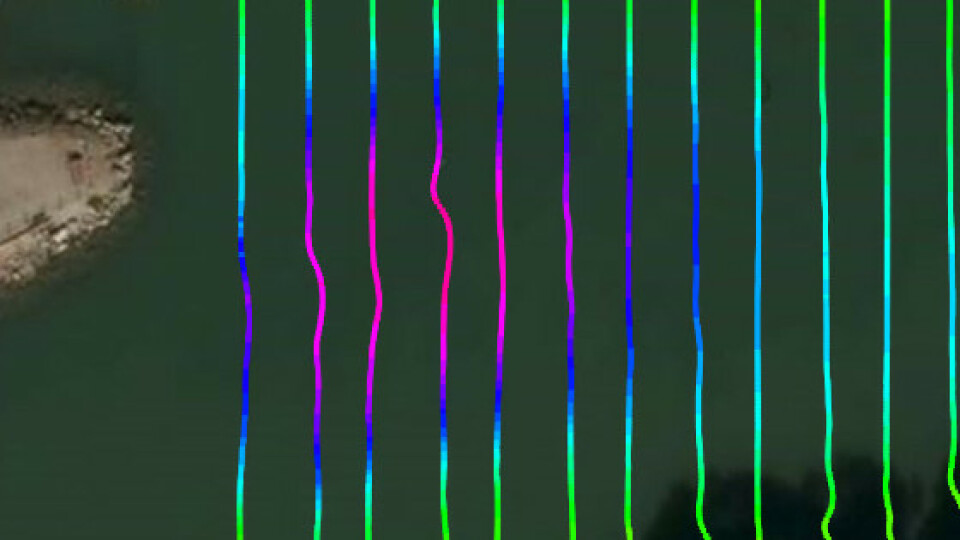
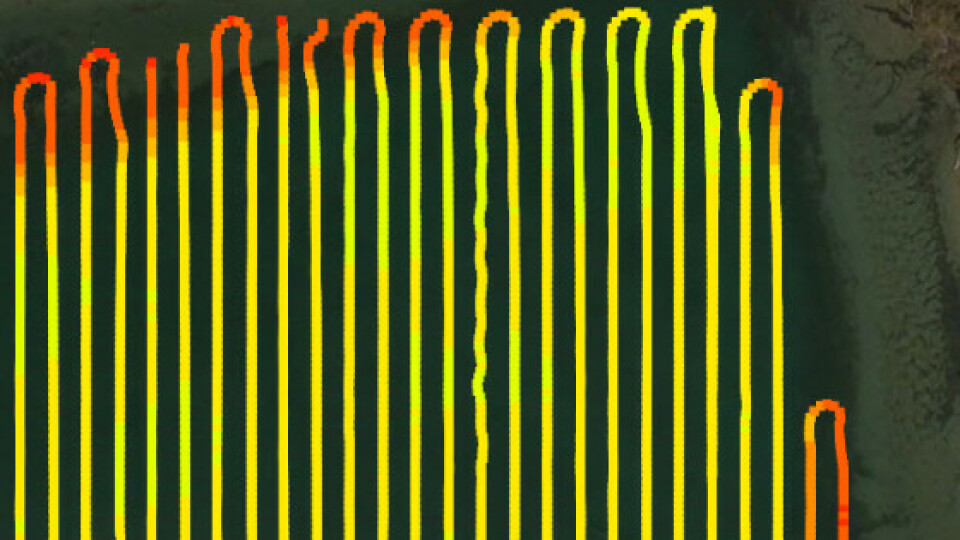
The CEE-USV is a long monohull design with closely spaced propellers, so some drift off the route during turns is unavoidable. However even end of line turns are performed without excessive distance off the survey route. During the lagoon survey, a moderate tidal inflow was present in the southwest corner – evidenced by the deep scour hole. As the CEE-USV transited the current, it immediately started to drift off line but rapidly began correcting the error with a crabbing manouver using increased thrust, rudder deflection, and differential thrust. The maximum drift was still only 1.4m (4.5ft).
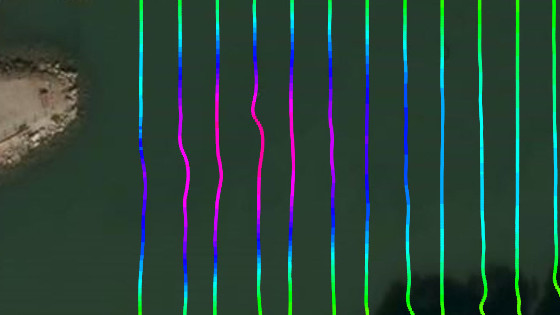
Tide inflow and corresponding track drift.
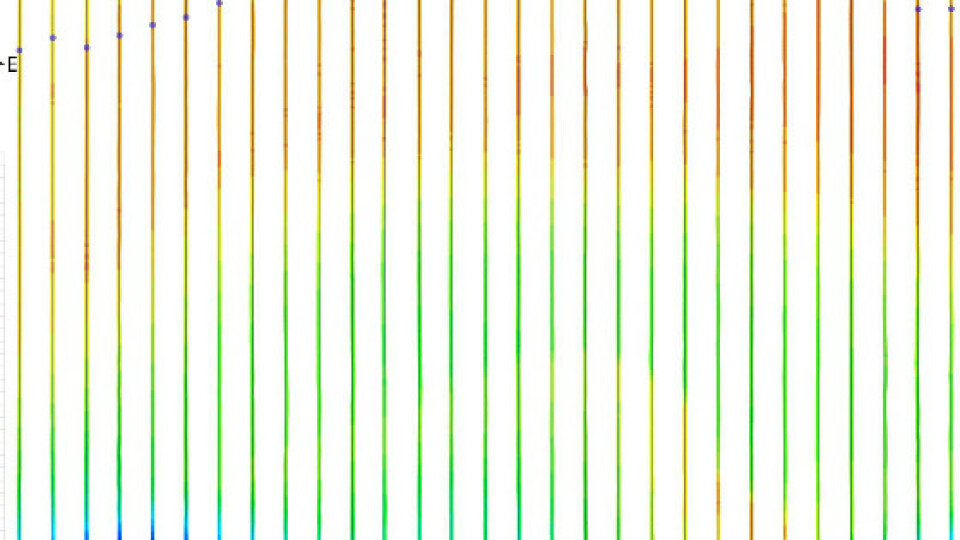
When survey areas have surface vegetation such as cattails, eelgrass or seaweed it is less likely that a small USV such as the CEE-USV is the appropriate vehicle to use, owing to the propensity to foul propellers. In this lagoon survey, some eelgrass and debris was present. At one point during the survey, an accumulation of vegetation became large enough to become obvious in the data. Slight or moderate fouling typically cannot be seen on the track performance but as propellers foul more heavily, the boat does not behave as expected and the autopilot has to work harder to maintain course.
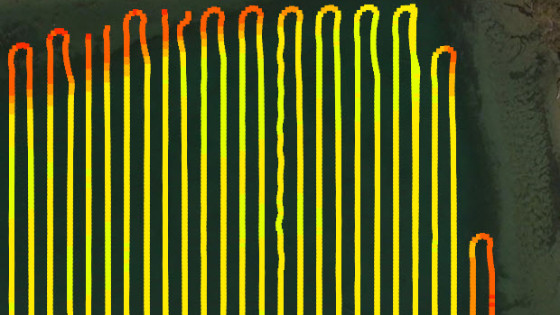
The effect of vegetation entanglement.
As the CEE-USV may be switched to manual navigation mode at any time, if the operator decides there needs to be a cleaning of the props the boat may be driven back to shore. Any fouling material can be removed and then the boat can be driven back close to the location where the route was interrupted and switched back into autopilot mode to continue as if nothing happened!
Data Quality
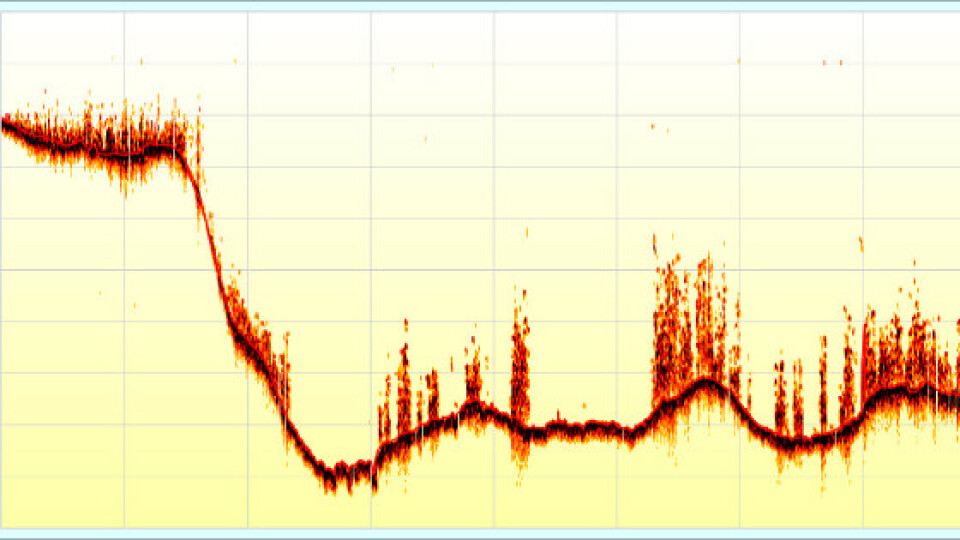
With the presence of eelgrass in the center of the lagoon, largely in an east-west strip, the ability of the CEE-USV’s on-board CEESCOPE™ echosounder to record a full water column echogram was important to prevent sounding inaccuracies. Spurious signals from debris and vegetation were first eliminated from the sounding data to provide accurate depths across the lagoon.
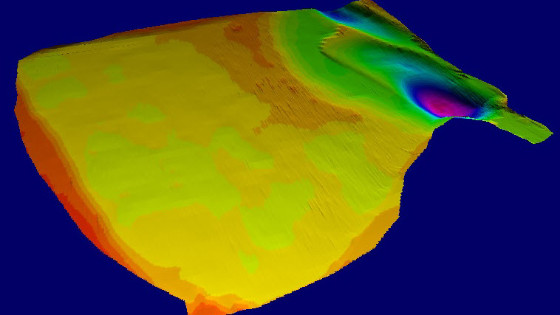
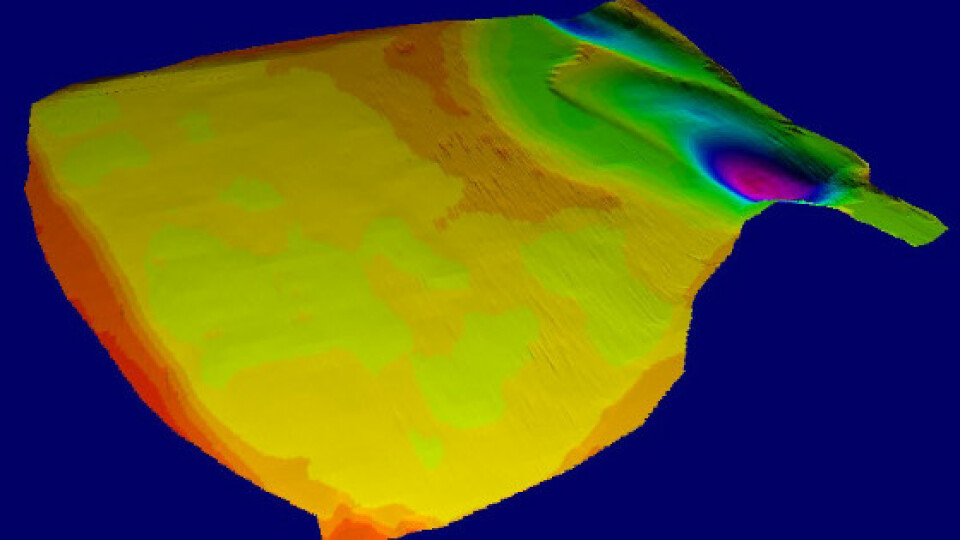
Hydromagic 3D view of TIN model XYZ surface



![3月21日-封面[1].jpg](https://cdn.geo-matching.com/voeE1ywo.jpg?w=320&s=6b3b1a0215d770f8797653e9202a8f52)








{kind=link}