

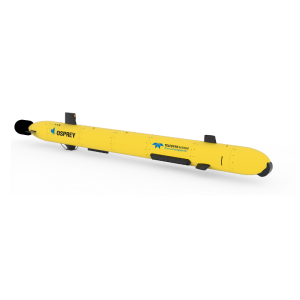
Description
Specifications
-
Operations
-
Min. turning radius [m]
11
Launch and Recovery System
VCT Universal Docking System (Underwater) and LARS (Ramp-style)
Max. speed [kn]
7
Min. crew size
2
Min. required number of surface computers
1
Required size of storage room
3m long
Other requirements
Autopilot for vehicle steadiness
-
General
-
Length [m]
2.67
Width [m]
0.32
Height [m]
0.32
Min. weight of AUV in air [kg]
225
Max. Weight of AUV in air [kg]
225
Portable
N
Crane required
Y
Maximum depth rating [m]
900
Number of thrusters
1
Thruster specifications
Field-replaceable tail cone with prop, 3 fins
Propulsion or glider
-
Telemetry and Control
-
Acoustic telemetry
Y
Acoustic baud rate [bit/s]
40
Radio telemetry
Y
Radio baud rate [bit/s]
54000
Max. Baud rate of ethernet connection [Mb/s]
54000
Data sent to the surface
Position; Fault condition
Control parameters sent to the AUV
Stop/Switch Mission Plan
Emergency recovery procedure
Positive buoyancy; Acoustic locator
-
Navigation and Payload
-
Navigation sensors - standard
IMU, GPS, Depth, USBL Transponder (tracking)
Navigation sensors - optional
Upgraded IMU, DVL
Payload sensors - standard
Edgetech 230 kHz/850 kHz Side Scan Sonar
Payload sensors - optional
Customer request
-
Battery
-
Total energy content [Wh]
2500
Nominal battery power [W]
500
Endurance at nominal power [hr]
5
Battery swap
N
Recharge time from empty [hr]
8
-
More information
-
Applications
Users that benefit from a single system that can be used as a high-performance tow body and an untethered UUV based on the same vehicle. Search and survey; Mine countermeasures (MCM); Open architecture R&D platform
Commercial Options
VCT Operator Console software standard.
Distinguishable features
Powered Tow Body Mode converts the UUV into a steady towfish by swapping out the nose section and using propulsion to achieve depth.




{kind=link}