Eelume Underwater Intervention Vehicle
Eelume underwater Intervention vehicles are basically self-propelled robotic arms whose slender and flexible body can transit over long distances and carry out light inspection, maintenance and repair jobs in confined spaces not accessible by conventional underwater vehicles. It will be equipped with several types of sensors and tools needed to fulfil its mission.

Kongsberg Discovery
Horten, NO
Description
Eelume marine robots will be permanently installed on the seabed being ready 24/7 for planned and on-demand inspections and interventions regardless of weather conditions. This solution will dramatically save costs by reducing the use of expensive surface vessels, which are needed to support such operations today. Eelume underwater intervention vehicles can be installed on both existing and new fields where typical jobs include; visual inspection, cleaning, and operating valves and chokes. These jobs account for a large part of the total subsea inspection and intervention spend.
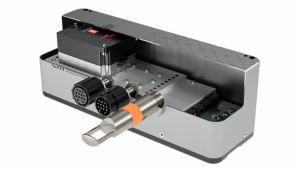
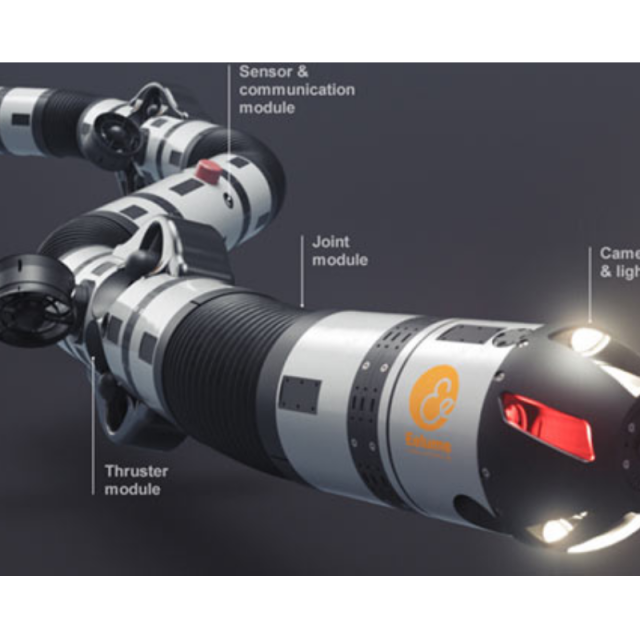
Eelume vehicles are modular combinations of joints, thrusters and various payload modules. The slender body allows for precision hovering and manoeuvring even in strong ocean currents.
Sensors and tools can be mounted anywhere along the flexible body. A dual-arm configuration is achieved by mounting tooling in each end and forming the vehicle body into a U-shape. One end of the arm can grab hold to fixate the vehicle, while the other end carry out inspection and intervention tasks. One end of the arm can also provide a perspective camera view of a tool operation carried out at the other end.
All these flexible operational scenarios are made possible by the unique shape-changing capabilities of the Eelume vehicles.
Do you have questions about this product?
- Questions about price, availability, and/or retailers
- Questions about technical specifications and usage
- Questions about suitability for your project or application
Specifications
-
Operations
-
Max. speed [kn]
4
Articulated Viewing head
Articulated viewing head 2xDoF (+/- 80deg in yaw/pan and pitch/tilt axes)
Integral Sensors
Attitude; Heading; Depth; Altitude
-
General
-
Propulsion or glider
Length [m]
2.5
Width [m]
0.2
Min. weight of AUV in air [kg]
70
Portable
Y
Crane required
N
Maximum depth rating [m]
500
Thruster specifications
Robot manoeuvrability 6x Degrees of Freedom
Demonstration Video (YouTube/Vimeo URL)
https://www.youtube.com/watch?v=9ztvHWytPb4
Demonstration Video 2 (YouTube/Vimeo URL)
https://www.youtube.com/watch?v=7iNDOz7ShEQ
-
TMS and Tether
-
Tether Cable Lenght
500m
Tether Cable weight in water
Neutrally buoyant
TMS cable management
Manual tether cable spooling
TMS dimensions
1.0m x 1.0m x 0.9m
TMS weight (incl 500m cable)
50kg
-
Topside Equipment
-
Interface Console Dimensions
0.65m x 0.65m x 0.6m
Weight
20 kg
Input Voltage/power
220V-240V AC / 50Hz or 60Hz / 1.5KW
Tether cable Voltage
300V DC
Video recording
4x 480 Gb Solid State Hard Drive (optional capacity)
Tether cable communication
WiFi (rotating) or Ethernet (fixed)
Control Equipment
Windows 10 Laptop + Eelume Control Software
Control Interface
30 Mouse + Joystick
Documents
Brochure
EELY500_Eelume.pdf






{kind=link}