






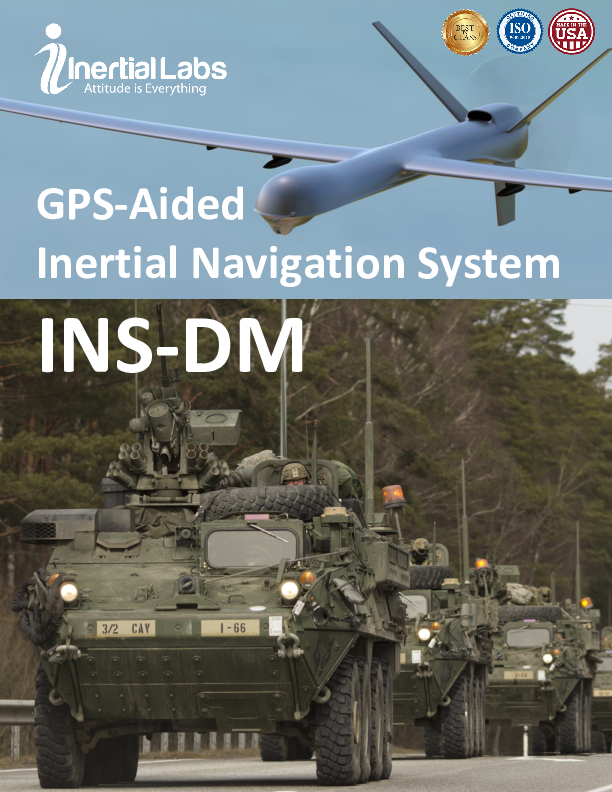
INS-DM – Dual GNSS Antenna Inertial Navigation System
IP68 Super Ruggedized Dual Antenna GPS-Aided Inertial Navigation System
The Inertial Labs GPS-Aided Inertial Navigation System (INS-DM) is the latest version of Inertial Navigation System, developed by Inertial Labs. The INS-DM is the result of over 20 years of our experience in developing and supplying INS solutions to land, marine and aerial platforms around the world. The Inertial Labs GPS-Aided Inertial Navigation System (INS-DM) is the latest version of Inertial Navigation System, developed by Inertial Labs.

Inertial Labs, Inc.
Paeonian Springs, US
Description
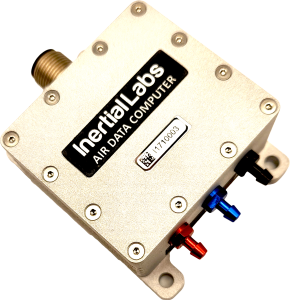
This system, the INS-DM, is an IP68 rated version of an all-new generation of super ruggedized, shielded from the EMC/EMI, fully-integrated, combined Inertial Navigation System (INS) + Attitude & Heading Reference System (AHRS) + Air Data Computer (ADC) high-performance strapdown system, that determines position, velocity and absolute orientation (Heading, Pitch and Roll) for any device on which it is mounted. Horizontal and Vertical Position, Velocity and Orientation are determined with high accuracy for both motionless and dynamic applications.
The Inertial Labs INS-DM can support multiple types of MEMS Inertial Measurement Units (IMU) developed by Inertial Labs. Additionally, the INS-DM supports other IMU’s, like the Honeywell HG4930. The INS-DM also utilizes different multi constellation (GPS, GLONASS, GALILEO, QZSS and BEIDOU) GNSS receivers like Novatel OEM7 series or the u-blox F9 series.
The design of the INS-DM also includes an optional Air Data Computer (ADC), supported by two Honeywell barometric sensors, and the ability to support an internal Fluxgate or external Stand-Alone Magnetic Compass (SAMC). The INS-DM contains Inertial Labs new on-board sensor fusion filter, state of the art navigation and guidance algorithms, and calibration software.
KEY FEATURES, BENEFITS & FUNCTIONALITY
- Commercially exportable GPS-Aided Inertial Navigation System
- 3-in-1 Strapdown System: INS + AHRS + ADC (Air Data Computer)
- Embedded industrial, tactical, or navigation grade Honeywell or Inertial Labs MEMS Inertial Measurement Unit (IMU)
- Novatel OEM7 or u-blox ZED-F9P F9 high precision GNSS receiver
- GPS, GLONASS, GALILEO, BEIDOU, QZSS, RTK supported signals
- Total and static pressure sensors for calculating indicated airspeed
- SP, SBAS, DGPS, RTK and PPP corrections supported for precise real time operation
- GNSS measurements and IMU raw data for post processing
- Advanced, extendable (based on application), embedded Kalman Filter based sensor fusion algorithms
- State-of-the-art algorithms for different dynamic motions of helicopters, UAV’s, marine vessels, and ground vehicles
- Full temperature calibration of all sensing elements
- EMC, EMI and ERD protection (MIL-STD-1275)
- Environmentally sealed (IP68)
- Aiding data: Wind sensor, Air Speed Sensor, Doppler shift from locator (for long-term GPS denied), External position and External Heading
Do you have questions about this product?
- Questions about price, availability, and/or retailers
- Questions about technical specifications and usage
- Questions about suitability for your project or application
Specifications
-
Other specifications
-
Export restrictions
ITAR free
Graphical user interface
Y
Typical application
Land, marine and aerial platforms
Distinguishable features
Aiding data: Wind sensor, Air Speed Sensor, Doppler shift from locator (for long-term GPS denied), External position and External Heading
-
Environmental
-
Min. operating temperature [°C]
-40
Max. operating temperature [°C]
80
-
Software
-
Name
Advanced, extendable, embedded Kalman Filter, sensor fusion algorithms
Filtering
Y
Adaptable input signals
Y
Integrity monitoring of position input
Y
-
GNSS aided uncertainty
-
Heading [deg]
0.08
Pitch [deg]
0.01
Roll [deg]
0.01
-
General
-
Type of application
Air, Land, Marine, Space
Year of initial development
2021
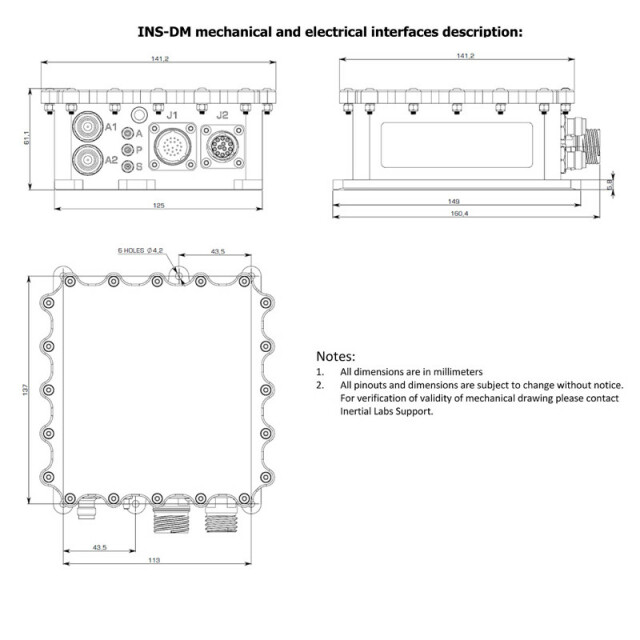
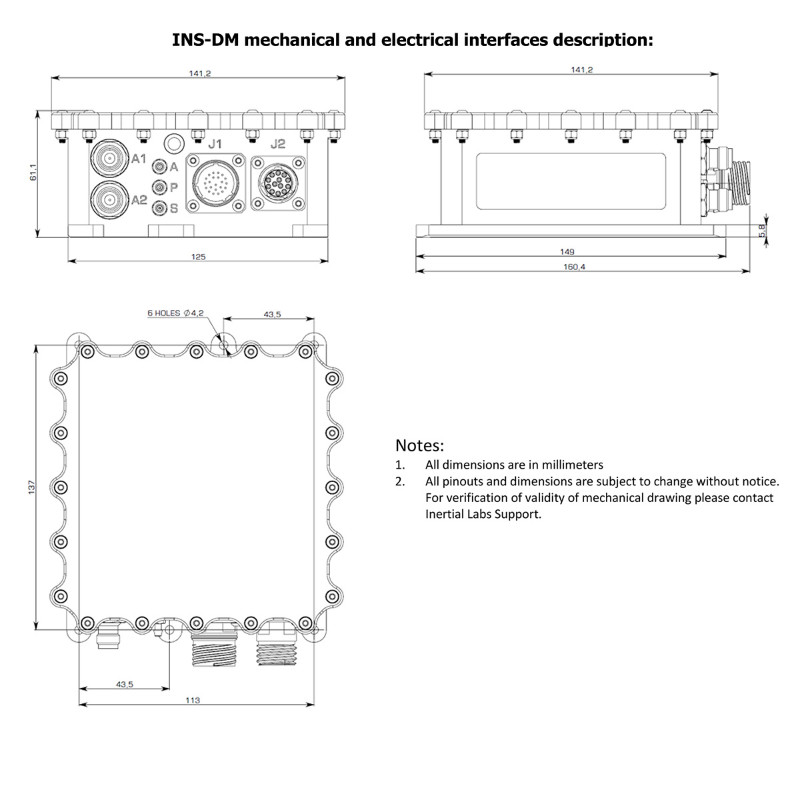
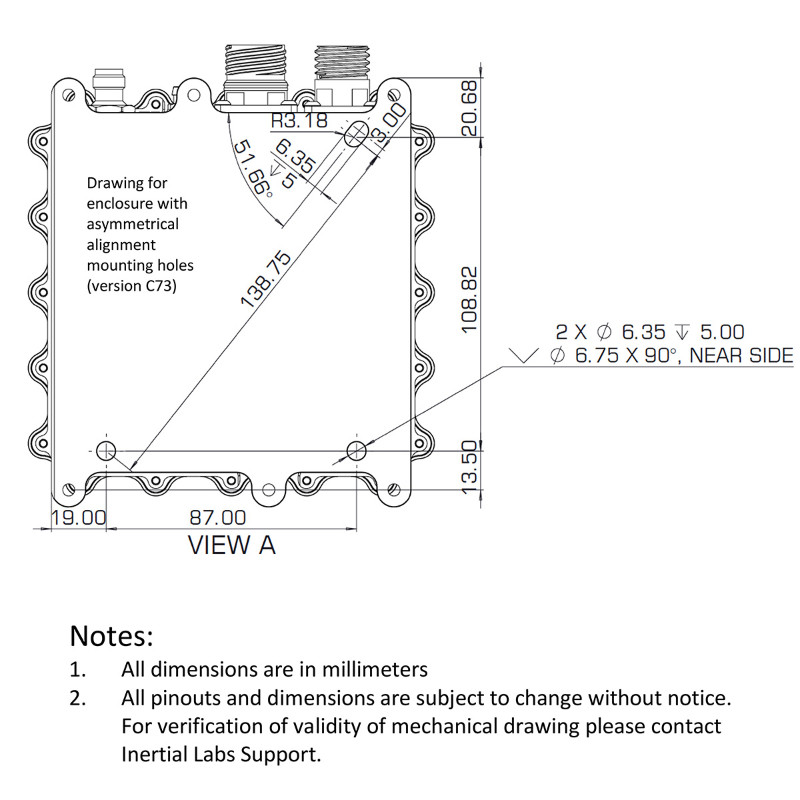
Height [mm]
61.1
Width [mm]
141.2
Length [mm]
160.4
Weight [kg]
1.345
Min. Voltage (DC)
9
Max. Voltage (DC)
36
Splashproof casting
Y
Water resistant casting
Y
Water resistance [m]
1.5
Mean time between failures [hr]
100000
Type of accelerometer
MEMS
Type of gyro
MEMS
Removable from base plate
N
Moving parts
N
-
GNSS Positioning Sensor
-
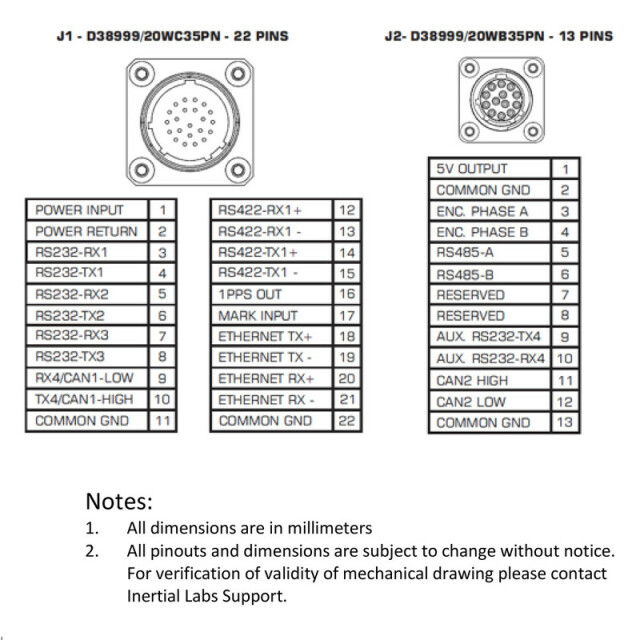
Number of integrated GNSS receivers and antenna ports
2
No. channels p receiver
555
Tracked satellite signals
GPS L1 C/A, L1C, L2C, L2P, L5; GLONASS L1 C/A, L2 C/A, L2P, L3, L5; BeiDou B1I, B1C, B2I, B2a, B3I; Galileo E1, E5 AltBOC, E5a, E5b, E6; NavIC (IRNSS) L5; QZSS L1 C/A, L1C, L2C, L5, L6; L-Band
SBAS differential signals
WAAS; EGNOS; MSAS; GAGAN; SBAS L1, L5; DGPS; RTK; PPP Terrastar
RTK Network Compatibility
RTCM 2, RTCM 3
Update rate [ Hz ]
100
Cold start [ seconds ]
39
Hot start [ seconds ]
20
-
Data formats
-
NMEA formats
NMEA 0183
RTCM
Y
Other
Binary
-
Inertial Measurement Unit
-
Accelerometer bias [µ-g]
0.25
gyro bias [deg/hr]
0.025
-
GNSS positional accuracy
-
Horizontal Position Accuracy [ RMS in cm ]
1200
Horizontal Position Accuracy (SBAS) [ RMS in cm ]
60
Horizontal Position Accuracy (RTK) [ RMS in cm ]
1
Documents
Brochure
ins-dm-datasheet-rev1-9-jan17-2022.pdf
1.15 MB
Related products
![YRBKMWXn[1].png](https://cdn.geo-matching.com/En53gY1o.png?w=300&h=300&crop=1&s=024b01a5456af84a24979824702460d7)





{kind=link}