
Description
The MicroStrain by HBK 3DM-CV5 family of lower-cost miniature industrial-grade board-level inertial sensors provides a wide range of triaxial inertial measurements and computed attitude and navigation solutions.
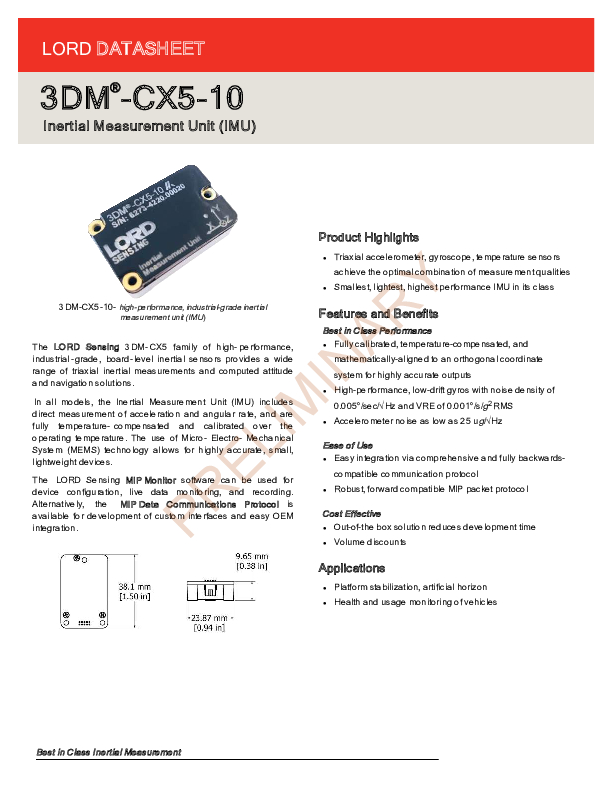
In all models, the Inertial Measurement Unit (IMU) includes direct measurement of acceleration and angular rate. In models that include computed outputs, sensor measurements are processed through an auto-adaptive estimation filter algorithm to produce high-accuracy computed outputs under dynamic conditions. Compensation options include automatic compensation for magnetic anomalies, gyro and accelerometer noise, and noise effects. The computed outputs vary between models and can include pitch, roll, yaw, a complete attitude and heading reference solution (AHRS), or a complete position, as well as integrated GNSS outputs. All sensors are fully temperature-compensated and calibrated over the operating temperature. The use of Micro-Electro-Mechanical System (MEMS) technology allows for highly accurate, small, lightweight devices.
Best in-Class Performance
Bias tracking, error estimation, threshold flags, and adaptive noise modelling allow forfine-tuningg to conditions in each application
Smallest and lightest industrial AHRS with Adaptive Kalman Filter available
High-performance, low-cost solution
Direct PCB mount or chassis mount with ribbon cable
Precision mounting alignment features
Ease of Use
User-defined sensor-to-vehicle frame transformation
Easy integration via comprehensive and fully backwards-compatible communication protocol
Common protocol between 3DM-GX3, GX4, RQ1, GQ4, GX5, and CV5
Cost Effective
Out-of-the-box solution reduces development time
Volume discounts
Do you have questions about this product?
- Questions about price, availability, and/or retailers
- Questions about technical specifications and usage
- Questions about suitability for your project or application
Specifications
-
Environment
-
Operating shock tolerance [g]
500
Min. operating temperature [C]
-40
Max. operating temperature [C]
85
Casting and coating
Aluminum Enclosure
-
Power Supply
-
Min. Voltage (DC)
3.2
Max. Voltage (DC)
5.2
-
Accelerometers
-
Num. of Accelerometers
1
Range [max g]
8
Bandwidth [ Hz ]
225
Alignment Error [ ± ° ]
0.05
In-Run Bias Stability [mg]
0.04
Non-linearity [ % ]
0.02
Noise
Vibration rectification error (VRE): 0.03%
-
Operational
-
Interface types
Digital
Other interfaces and additional information
TTL serial (3.0 V dc, 9,600 bps to 921,600 bps, default 115,200)
Output data formats
Inertial Measurement Unit (IMU) outputs: acceleration, angular rate, delta theta, delta velocity. MIP data communications protocol with sample code available (OS and platform independent)
Output frequency [ Hz ]
1000
Max. rotation speed [deg/s]
300
Interfaces
-
Gyroscopes
-
Num. of Gyroscopes
1
Range [± ° / sec]
300
In-Run Bias Stability [ °/ hr]
8
Bandwidth [ Hz ]
500
Non-linearity [ % ]
0.02
Alignment Error [ ± ° ]
0.05
Noise
Vibration induced noise: 0.072°/s RMS/g RMS. Vibration rectification error (VRE): 0.001°/s/g² RMS.
-
General
-
System components
Height [mm]
97
Width [mm]
24
Length [mm]
38
Weight [gr]
11
-
Additional specifications
-
Distinguishable features
Smallest, lightest, highest performance IMU in its class. Triaxial accelerometer, gyroscope, temperature sensors achieve the optimal combination of measurement qualities.
Application
Platform Stabilization, artificial horizon.
Documents
Brochure
3dm-cx5-10-datasheet-8400-0114-0.pdf
89.12 KB






{kind=link}