

Rescue Potential of Multi-sensor (e.g. Lidar) UAVs
When disaster strikes, the courage and experience of rescue task forces is put to the test. They face heading into the unknown every time they enter a terrain during a rescue mission. Efforts to implement the latest technological tools, such as UAVs, to support their work are aimed at providing safer working conditions for rescue teams and speeding up search activities to improve the efficiency of the entire rescue mission. UAV reconnaissance is considered a very powerful way of overcoming the potentially dangerous lack of information in affected areas. Specially equipped unmanned aerial vehicles (UAVs or ‘drones’) have in the past been proposed for firefighting, for search missions, for delivery of rescue kits, and many other impressive tasks. There are high expectations of the use of drones for this type of work, and for obvious reasons: they can go where it would be too hazardous or even impossible for manned aircraft to go. This is one of the major arguments for UAV utilisation.
Simulation of a Contaminated Landscape with Mutlisensor UAVs (e.g. Lidar)
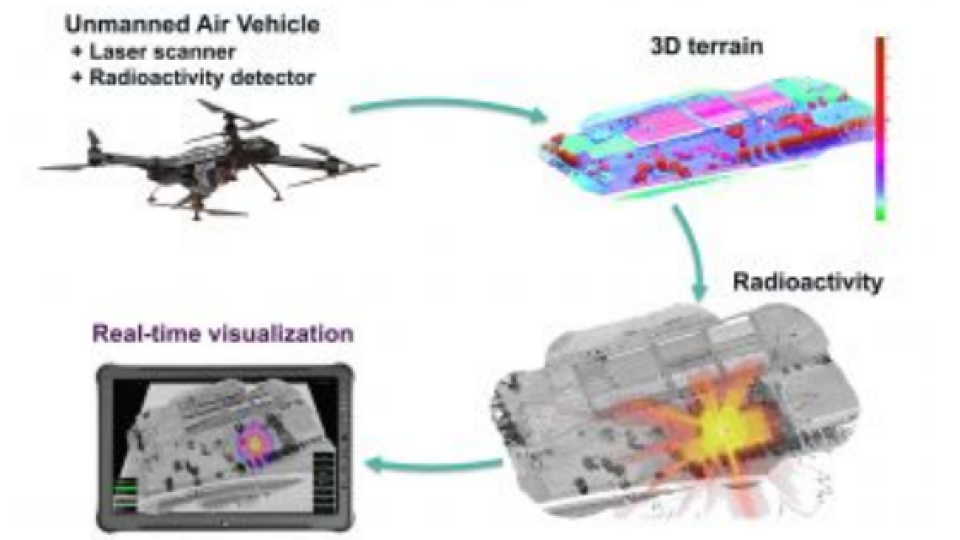
An experiment was carried out within the framework of the Austrian research project called ‘SecuRescue’. The following emergency scenario was imagined for a test setup: a disaster, caused by natural forces or technical failure, hits an urbanised and partly industrial area. The immediate effect is complete destruction of the topographic array caused by collapsed buildings, making existing maps useless. The test focused on how to provide essential access information to first responders as quickly as possible, and ideally in real time. Furthermore, sources of hazard – which could include things like contamination by toxic gas leakage, risk of fire or explosion – were to be identified. In this test scenario, nuclear radiation was the simulated danger.
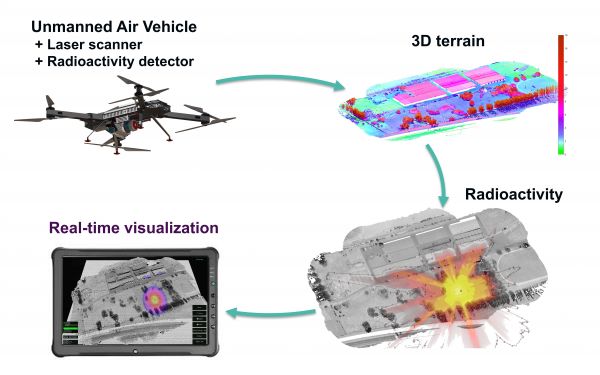
Figure 1: Concept of the ‘SecuRescue’ Austrian research project.
The scenario included as many factors as possible in order to adequately reflect the complexity of such a situation. Emergency forces are familiar with such scenarios, in which everything can be expected and nothing can be ruled out. Creating a scenario such as this also helped to explain in an experimental way which technical solutions might be proposed to confront it: what kind of information is crucial, how it is to be obtained and communicated to the rescue team, and how a UAV can be safely employed in these conditions. Performance criteria and methodological considerations had to be taken into account when choosing the sensor system configuration, as well as the UAV that served as the carrier platform.
UAV Lidar for reliability and precision
The RIEGL VUX-1UAV Lidar system was used for acquiring the precisely updated topographic information. The VUX-1UAV is a survey-grade laser scanner with a rotating mirror, a 330° field of view and a rate of up to 500,000 measurements per second. It is a very lightweight and compact laser scanner, meeting the challenges of UAV survey requirements in terms of both measurement performance and system integration. In normal circumstances, the measurement data of the VUX-1UAV is stored on an internal SSD drive and processed offline after data acquisition. With the associated post-processing toolchain, a measurement accuracy of 10mm is achieved.

Figure 2: UAV trajectory coloured by radiation intensity.
According to Dr Martin Pfennigbauer, CTO and director of research at RIEGL, the specific challenge of the application lies in the fact that information is conventionally accessed and analysed from Lidar data during post-processing. However, time is of the essence in rescue missions; first responders need immediate information in order to safely access the terrain. So while reliable and precise data acquisition is well within the proven capacity of state-of-the-art Lidar surveying, it is tricky to select from the enormous amount of data only that part of the information which would be relevant for orientation and localisation purposes and to subsequently transmit it in real time.
Do you have questions about this article?
Get in touch with RIEGL | Innovation in 3D, and they would be happy to answer any questions you have about pricing, suitability, availability, specs, etc.

Related products








{kind=link}