
Nemo110 USV
Unmanned Surface Vessel
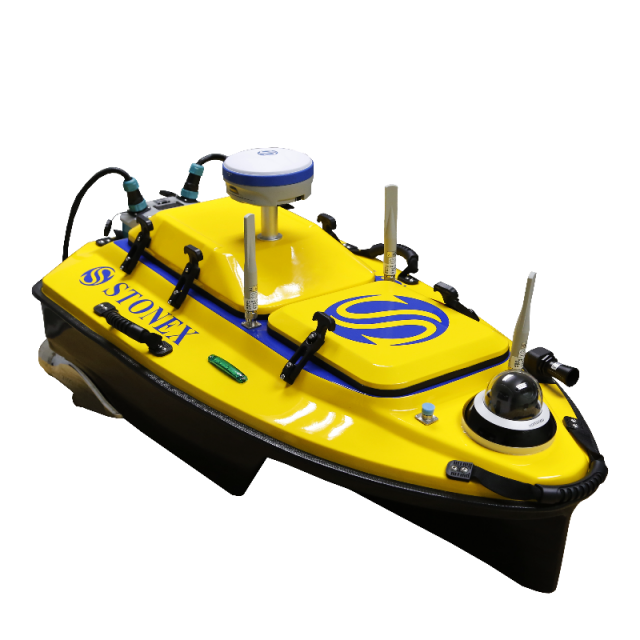
NEMO110 is an unmanned vessel system with integrated single-beam echosounder.

Stonex
Paderno Dugnano (MI), IT
Description
NEMO110 is an unmanned vessel system with integrated single-beam echosounder. Thanks to this versatile solution it is possible to carry out surveys and measurements in areas not reachable, or difficult to reach, by crewed ships such as shallow waters and coastal areas.
NEMO110 can be used in underwater topographic surveying and mapping, hydrological surveying and underwater hidden pipe detection.
Super Power System
The hull propulsion system has strong power, high reliability, stable driving and it is suitable for various water flow environment measurement. The vessel can reach 5m/s speed.
Smooth Sailing Performance
The vessel has a good seal at sea and in waterways thanks to its design.
Easy to Maintain
Modular design makes it convenient for quick installation and disassembly.
Anticollision Sensor
Avoid every obstacle. The anticollission sensor installed on the front of the vessel can detect an obstacle and stop the propellers.
Do you have questions about this product?
- Questions about price, availability, and/or retailers
- Questions about technical specifications and usage
- Questions about suitability for your project or application
Specifications
-
More information
-
Applications
shallow waters surveying, monitoring of small canals, underwater pipes detection, underwater topographic surveying and mapping
Distinguishable features
360° video camera
-
General
-
Length [m]
1.18
Width [m]
0.63
Height [m]
0.34
Min. weight of USV in air [kg]
15
Max. Weight of USV in air [kg]
30
Portable
Y
Number of thrusters
2
Thruster specifications
Brushless DC motor
Chassis
Kevlar + carbon fiber composite material
-
Communication and Control
-
Type of Communication
Dual communication (wireless point-to-point communication / network communication)
Data sent to shore
Y
Emergency recovery procedure
YES
-
Navigation and Payload
-
Navigation sensors - standard
Anticollision, GNSS with IMU, automatic return when lost or low battery
Payload sensors - standard
Single-beam echosounder
Payload sensors - optional
ADCP, Side-scan sonar
-
Operations
-
Operational Area
small canals, shallow waters, areas near the shore
Launch and Recovery System
Y
Max. speed [kn]
9.7
Min. required number of surface computers
1
Max. Remote Operating Range {m}
3000
Max. WMO seastate
3
-
Energy and Propulsion
-
Propulsion
Brushless DC motor
Energy Source
DC battery








{kind=link}