
Nuwa APP
User Friendly Survey Application
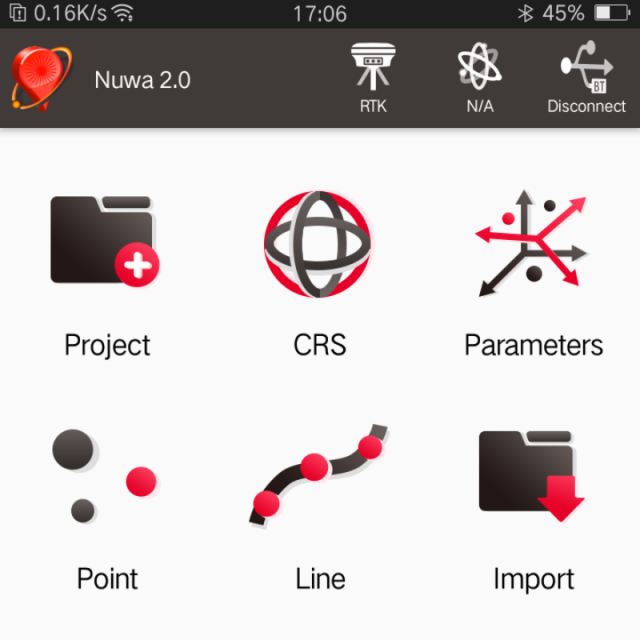
Nuwa is a survey application software based on Android OS (Operating System), designed by and all rights reserved to Tersus GNSS Inc. Nuwa is simple, easy to use and has friendly user interface. It is designed to work with David GNSS receiver and Oscar GNSS Receiver.
Tersus GNSS
Shanghai, CN
Description
Nuwa is a survey application software based on Android OS (Operating System), designed by and all rights reserved to Tersus GNSS Inc. Nuwa is simple, easy to use and has friendly user interface. It is designed to work with David GNSS receiver and Oscar GNSS Receiver.
Specifications
-
Laser scanning
-
Laser scan data collection
N
Compute unregistered point cloud
N
Point cloud registration to targets in cloud
N
Cloud to cloud registration
N
-
Photogrammetric data processing
-
Photo planning
N
Processing in cloud / on-premise
N
Airborne photography
N
Handheld terrestrial photography
N
Can more than one camera be used?
N
Camera calibration computed for all cameras used
N
Accepts input camera calibration data
N
Data from more than one camera supported
N
Accepts GNSS RTK photo exposure positions
N
Supports registration to ground control
N
-
GNSS data and processing
-
GNSS static / RTK data collection
Y
GNSS setting out
Y
Input data formats supported
CSV DAT
Static baseline post-processing
N
Output data for least squares adjustment with data from other sources
N
Base and rover RTK
Y
Network RTK
Y
Post processed kinematic
N
-
GNSS + dead reckoning data (mobile mapping)
-
IMU data used trajectory computation
N
SLAM data used in trajectory computation
N
Wheel odometer data used in trajectory computation
N
SfM (photogrammetry) used in trajectory computation
N
Adjust trajectory to fit overlapping point cloud data
N
Adjust trajectory to fit ground control points
N
Adjust point clouds (not trajectory) to fit ground control points
N
Trajectory provided with precision data
N
-
Levelling and Orientation
-
Rise and fall level book format output
N
Height of collimation level book format output
N
Unadjusted levels, adjustment and adjusted level shown
N
Output data for least squares adjustment with data from other sources
N
-
Total Station (TS) data processing
-
Traverse computation
N
Output data for least squares adjustment with data from other sources
N
Compute 3D radial observations
N
TS setting out
N
Feature attribute coding
N
Feature geometry coding
N
-
CAD functions
-
CAD functions for Internal measured building surveys
N
CAD functions for open drainage modelling
N
CAD functions for Rail applications
N
CAD functions for Road applications
N
CAD functions for Pipeline applications
N
CAD functions for Overhead Power Line applications
N
CAD functions for Site development applications
N
CAD functions for Industrial plant applications
N
-
General
-
Software version
2.0.0.8
Mobile (real time connected to instrument)
Y
Laptop / Office computer (post processing)
N
-
Integrated environment for
-
GNSS data
Y
GNSS + dead reckoning data (Mobile Mapping)
N
TPS data
N
Point cloud data
N
Level data
N
Integrated least squares computation of control
N
Transformation between map projections
Y
Compute grid DTM
Y
Compute TIN
N
Computation of sections through surfaces
N
Volume computation from sections
N
Volume computation by substracting surfaces
N










{kind=link}