
Description
Specifications
-
General
-
Year of initial development
2013
Min. external DC power [V]
12
Max. external DC power [V]
16
Weight in air [kg]
2
-
System integration
-
Remote operation capability
Y
Supported external data inputs
heave, position, tide
Marking of events and other annotations
Y
Real-time sound velocity and temperature profile inclusion
Y
Real-time coupling to survey/post-processing software
Y
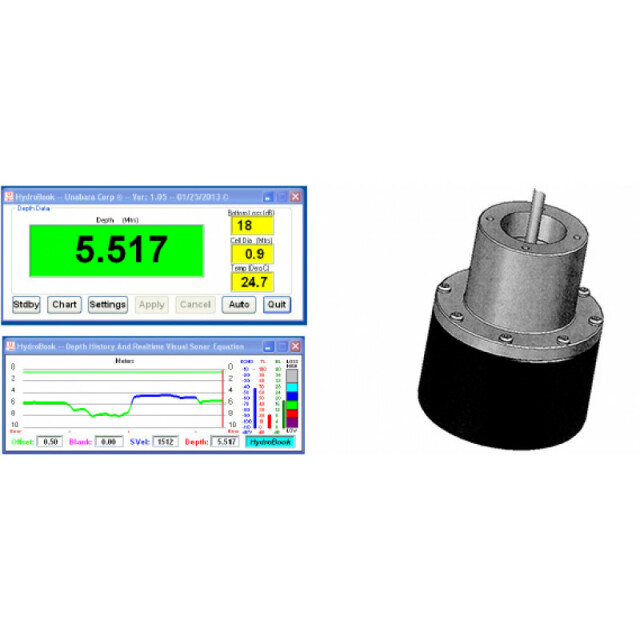
Data displayed in real time
Depth, Sound Velocity, Draft, Seabottom Loss/Bottom Reflectivity, Size of ensonified bottom cell, Seawater TemperatureDATA IS DISPLAYED VIA SOFTWARE APP ON WINDOWS-BASED NOTEBOOK OR TABLET PC; THIS SAME PC IS USED FOR SYSTEM SETUP AND CONTROL OF ECHO SOUNDER.
-
Mode of operation
-
Software platform
Tablet PC, Windows XP, Other
Min. depth of operation [m]
0.1
Max. depth of operation [m]
200
Min. frequency [kHz]
180
Max. frequency [kHz]
280
Number of simultaneous frequencies
1
Min. beam angle [deg]
5
Max. beam angle [deg]
10
Depth resolution [m]
0.01
Max. sounding rate [Hz]
30
-
Other specifications
-
Main use of the system
Depth measurement for hydrographic surveys and bottom contrasting for surface sediment type determination.Also, when used without a PC connected, as a precision depth sensor aboard Unmanned Surface Vessels (depth logging may be onboard the USV or sent to shore in real-time via telemetry).
Internal data logging details
-
Output
-
Data output options
All measured and inputted parameters
Data output formats
Serial: ODOM, DESO,NMEA sentences; PC: Unabara PC Driver (Also remote input/output capability via telemetry to allow control and monitoring of echo sounder aboard Unmanned Surface Vessels).
Data output for sea floor classification
Y
Data display details
All data and chart is displayed on the user\\\\\\\'s Windows-based Notebook or Tablet PC. (With each HydroBook Echo Sounder, Unabara supplies a PC-based APP for control/setup of HydroBook and data display).
Connectors
RS232, USB
-
Logging unit
-
Portability
Portable
More in Singlebeam Echosounders - SBES







{kind=link}