
Vercator Cloud
Vercator Cloud Delivers Game-Changing 3D Point Cloud Processing
Our new cloud-based platform allows users to harness the power of the cloud to rapidly align or classify laser scan data sets more accurately and cost-effectively than traditional on-desktop software. With a brand-new interface, user-friendly controls, and intuitive workflow, the Vercator Cloud makes laser scan processing: agile . scalable . efficient . reliable.
Correvate
London, GB
Description
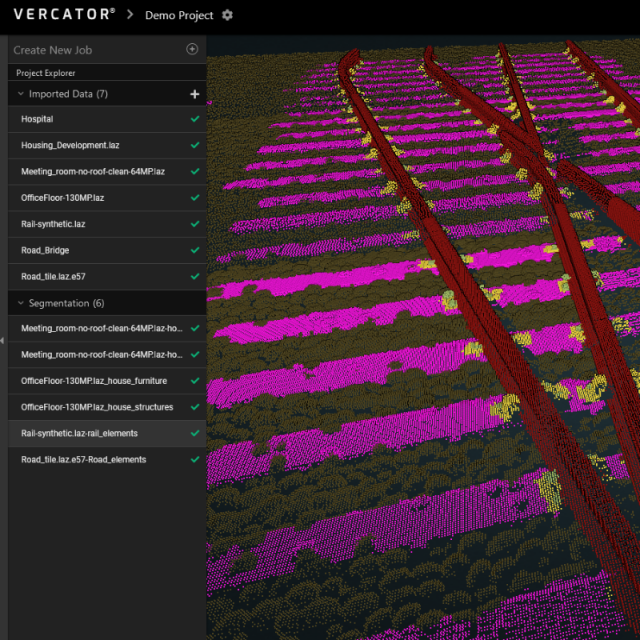
The Vercator® cloud platform provides point cloud processing that automatically aligns and classifies point cloud data created by static terrestrial laser scanners, saving time in the field by enabling targetless scanning and in the office by registering data sets in the cloud. This powerful set of services is aimed at land surveyors, engineers and those involved in reality capture and brings automation at a time when cost efficiency is high on the stakeholder agenda. The power of cloud processing offers vast improvements to the survey and reality capture community by delivering faster, more reliable, more accurate and affordable point cloud registration. With no need for hard- and software updates, computer performance issues and user concerns are eliminated. Plus, with the prospect of 5G data technology imminent, the convenience of working and sharing from the cloud signals a clear path forward for the laser scanning community.
With a brand-new interface, user-friendly controls, and intuitive workflow, Vercator cloud makes laser scan alignment simple and reliable. Load a scan network from the Vercator mobile app or plan your own using the handy network planning tool, set your scan parameters, then just hit ‘register’. With support for all the major scanner manufacturer formats, preparing raw laser scans for downstream work couldn’t be easier. Once complete, export the files and share them with colleagues and collaborators.
Vercator operates a pay-as-you-go model, allowing users to subscribe to the service as and when needed, with the flexibility to turn the service on and off as required.
Specifications
-
Hardware/software requirements
-
RAM [GB]
0
HD [GB]
0
Use of GPU
N
Processor
N/A
Stereo Display
N
Stand-alone
Yes
List software environment, e.g. Microstation
Web browser needed
-
Other
-
Support
https://vercator.com/support
-
Files and Registering
-
Input formats
pts, ptx, e57, fls, zfs, rdbx
Output formats
pts, ptx, e57, xyz, ply, las, laz, rcs
Stitching multiple scans
Y
Max. file size (#3D points)
100000000
Geo-referencing
Y
-
Interoperability
-
CAD software
Recap
Assigning colour from imagery to points
Y
-
General
-
Year of initial introduction
2019
Year of last update
2022
Source of Point Clouds
Indoor TLS, Outdoor TLS, Photogrammetric
Supported Systems
Chrome, Firefox, Edge
-
Visualisation and Editing
-
Zoom, pan and rotate
Y
Fly-throughs
N



{kind=link}