

SURE Aerial | Empowering Photogrammetry | Software
The solution for city- and countrywide mapping from aerial imagery
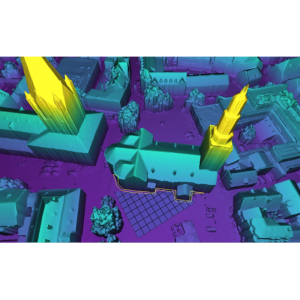
SURE Aerial is specifically designed for aerial image datasets captured with large frame nadir cameras, oblique cameras and hybrid systems with additional LiDAR sensors. Without limitation in image resolution, it empowers the production of 3D Meshes, True Orthophotos, Point Clouds and Digital Surface Models on common workstation hardware and in cluster environments. Simple to set up and operate, SURE is compliant with mapping industry standards and accessible for web streaming technologies.
nFrames GmbH
Stuttgart, DE
Description
Features
- Dense Image Matching
- Depth information for each pixel with sharp edges
- Multi-threading and GPU support
- Colored Point Clouds (las, laz)
- Digital Surface Models (tif, gtif, tfw)
- True Orthophotos (tif, gtif, tfw)
- Textured 2.5D and 3D Meshes (cesium, ESRI slpk, osgb, obj, collada)
- Global Color Balancing
- Automatic seam-line leveling and homogeneous blending
- Point Clouds and True Orthophotos with 8 Bit, 16 Bit and 4 channels
- All kinds of frame imagery
- Small, medium and large frame (e.g. >500 megapixels)
- Close range, UAV, manned aircraft (nadir, oblique)
- Transfer full image information to deliverables (8/16 Bit RGBI)
- LiDAR Point Cloud import (las, laz)
- Elastic Distributed Processing
- Scale to any size of datasets / timelines
- Add additional nodes while processing
- No setup and interactive management of cluster required
- Attractive license rental packages
- Completely scriptable and configurable with command line interface
- Open interfaces
- Direct orientation import from Trimble Inpho/Match-AT, Leica HxMap, Agisoft Photoscan, Pix4D and more
- Point Cloud import (las or laz)
- LiDAR Trajectory import (sbet, sol)
- Editing & data interaction
- 2D or 3D shapefiles for waterbodies and surface corrections
- Region of interest definition for processing and export
- Mapsheet definition (tiling scheme)
- Refeed edited or 3rd party Point Clouds to workflow
- SURE Editor (Mesh editing tools improving Meshes, True Orthos and DSMs)
Specifications
-
Feature Extraction and Mapping
-
Mapping facilities
N
Semi-automatic corner point extraction
N
Semi-automatic line feature extraction
N
Semi-automatic building extraction
N
3D superimposition
Y
Integration with point clouds
Y
Automatic texturing
Y
Integration with scanned maps
N
Integration with 2D vector maps
N
Integration with 3D vector maps
N
-
Required Computer System
-
System includes hardware
N
Operating system(s)
Windows, Linux
CPU (min.)
64 Bit processor
CPU (preferred)
Intel i7 or Xeon
Min. RAM memory [Mb]
16000
Preferred RAM memory [Mb]
64000
64-bit version of software available
Y
Distributed processing capacity
Y
GPU based calculations
Y
Min. data storage capacity [Gb]
1
Preferred data storage capacity [Gb]
4000
Min. graphic card
Nvidia with CUDA support
Hardware handling of big data sets
Nvidia with CUDA support and 11GB memory
Supported special hardware
Nvidia graphics cards. Runs on almost every common hardware and operating system.
User definable operations and extensions
24 Threads per license (1 graphics card) scalable through distributed processing cluster
-
Images and data
-
Source data
Airborne large and medium frame, close range, UAS, mobile mapping. Support of Nadir and Oblique imagery. Orientation information can be imported from Trimble Inpho-Match-AT, Trimble UASMaster or Trimble Business Center Photogrammetry, Pix4D Mapper, Agisoft Photoscan, Visual SFM, Bundler and more.
Input image formats
TIF (8 & 16 Bit, up to four channels, also tiled and pyramids), PNG (8 & 16 Bit), JPG (8 Bit)
Export data formats
True-Orthos: TIF, GeoTIF (multichannel, 8-16bit) - Pointclouds/DSM: LAS, LAZ, PLY, TXT - Meshes: OBJ/DAE, OSGB/IVE, Cesium, SLPK, Collada
Scanned analogue Aerial Photos
Y
Digital Aerial Nadir Frames
Y
Oblique Images
Y
Linear array sensors
N
Optical Satellite Images
N
UAS Images
Y
Radar Images
N
-
DEMs & Orthoimages
-
Automatic matching
Semi-Global-Matching variation (tSGM). By efficiently matching on automatically selected stereo models and subsequently merging and refining the result in the point cloud generation, low noise point clouds with quality information can be retrieved. Hierarchical approaches speed up the process and enable the support of depth large variations in the scene.
Automatic breakline extraction
N
Checking facilities (DEM editing)
Y
Automatic contour generation
N
Mosaicing of orthoimages
Y
True orthoimage generation
Y
Dense DSM creating capability
Y
DSM to DTM filtering
N
Automatic seam line creation
Y
Dense Image Matching
Y
-
Viewing System
-
Min. display memory [Mb]
512
Pref. display memory [Mb]
6000
Resolution
Any
Method of stereo image separation
Stereo image matching is performed using a hierarchical variation of the Semi Global Matching (SGM) approach called tSGM. Stereo visualization is only avaliable for inspection of generated meshes.
-
General
-
Year of introduction
2013
Year of last update
2020
Modular
SURE Aerial - SURE Aerial Mesh Add-on - SURE Editor
Regional settings available
English language, support of all units
License configuration
14 day trial version after free download, perpetual or rental options, 1 instance per computer
-
Orientation and triangulation
-
Automatic interior
N
Relative
N
Automatic aerotriangulation
N
Automated blunder detection
N
Self calibration
N
images simultaneously processed
Y
Automatic Relative
import of 3rd party exterior orientation formats and camera definitions including various distortion models
-
Measurement tools
-
Length
Y
Area
Y
Volume
N
-
Image manipulation & processing
-
Automatic contrast manipulations
Y
Spatial convolution
N
Resampling
Y
Radiometric corrections
Y
Radiometric adjustment for mosaicing
Y
-
More information
-
Main applications
City Modeling, Smart Cities, Area Mapping, Landcover Mapping, Cadastre, Environmental Research, Agriculture, Forestry, Construction, Mining, 5G planning, Infrastructure and Inventory, Energy, Powerline Mapping, Pipeline Mapping, Inspection, Risk Assessment, Forensics, Navigation, Classificaton, Change Detection, Volume computations
Distinguishable features
Support for LiDAR/Nadir imagery/Oblique imagery, generate true orthos with highest quality and sharpest edges, generate fotorealistic color-balanced 3D-meshes and 2.5D-meshes, preserve details but expect low noise in pointclouds / dsm / meshes (suited for e.g. pole detection), be compatible through flexible input-/output formats, export into streaming (level-of-detail aware) formats (e.g. Cesium tiles, Collada...), perfectly scale production capacity to any project sizes and available hardware and budget, use a dynamic number of computers and licenses even during on-going processing for distributed processing with autonomous cluster management / automatic tiling, pre-deliver finished sub-areas before complete project finishes (homogeneous borders are guaranteed), rely on predefined parameters through application scenarios and automatic best model selection, effectively stream data from disc for visualization and mesh editing, leverage high redundancy / reliability, customize processing with onestop / multiste





![ELCOVISION-10[1].jpg](https://cdn.geo-matching.com/wRWm7Gyp.jpg?w=300&h=300&crop=1&s=d9595e4eab382ce38f888d623cb550d7)








{kind=link}